1. 如图所示,有三个质量相等,分别带正电,负电和不带电的小球,从上、下带电平行金属板间的P点.以相同速率垂直电场方向射入电场,它们分别落到A、B、C三点,则( )
如图所示,有三个质量相等,分别带正电,负电和不带电的小球,从上、下带电平行金属板间的P点.以相同速率垂直电场方向射入电场,它们分别落到A、B、C三点,则( )
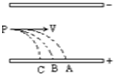
如图所示,有三个质量相等,分别带正电,负电和不带电的小球,从上、下带电平行金属板间的P点.以相同速率垂直电场方向射入电场,它们分别落到A、B、C三点,则( )| A. | A带正电、B不带电、C带负电 | |
| B. | 三小球在电场中运动时间相等 | |
| C. | 在电场中加速度的关系是aA>aB>aC | |
| D. | 到达正极板时动能关系EkA<EkB<EkC |
20.如图所示是空间某一电场中的一条电场线.M、N是该电场线上的两点.下列说法中正确的是( )

| A. | 该电场可能是匀强电场 | |
| B. | 比较M、N两点的场强大小,一定有EM>EN | |
| C. | 比较同一个试探电荷在M、N两点受到的电场力,一定有FM<FN | |
| D. | 比较电子在M、N两点的电势能,一定有EM>EN |
19. 如图所示,物体从光滑斜面上的A点由静止开始下滑,经过B点后进入水平面(设经过B点前后速度大小不变),最后停在C点.每隔0.2秒钟通过速度传感器测量物体的瞬时速度,表给出了部分测量数据.(重力加速度g=10m/s2)求:
如图所示,物体从光滑斜面上的A点由静止开始下滑,经过B点后进入水平面(设经过B点前后速度大小不变),最后停在C点.每隔0.2秒钟通过速度传感器测量物体的瞬时速度,表给出了部分测量数据.(重力加速度g=10m/s2)求:
(1)斜面的倾角α;
(2)物体与水平面之间的动摩擦因数μ;
(3)t=0.6s时的瞬时速度v.
如图所示,物体从光滑斜面上的A点由静止开始下滑,经过B点后进入水平面(设经过B点前后速度大小不变),最后停在C点.每隔0.2秒钟通过速度传感器测量物体的瞬时速度,表给出了部分测量数据.(重力加速度g=10m/s2)求:| t(s) | 0.0 | 0.2 | 0.4 | … | 1.2 | 1.4 | 1.6 | … |
| v(m/s) | 0.0 | 1.0 | 2.0 | … | 1.1 | 0.7 | 0.3 | … |
(2)物体与水平面之间的动摩擦因数μ;
(3)t=0.6s时的瞬时速度v.

 如图为A、B两个电阻的电压-电流图象,根据图象可得到:RA=10Ω,RB=20Ω;若将两个电阻分别接入电路时,两电阻两端电压之比为16:5,则通过它们的电流之比为32:5.
如图为A、B两个电阻的电压-电流图象,根据图象可得到:RA=10Ω,RB=20Ω;若将两个电阻分别接入电路时,两电阻两端电压之比为16:5,则通过它们的电流之比为32:5.
16.某实验小组利用拉力传感器和速度传感器探究“动能定理”.如图1,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B时的速度大小.小车中可以放置砝码.

(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M′;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;
②将小车停在C点,释放小车,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度.
③在小车中增加砝码,或减少钩码,重复②的操作.
(2)表是他们测得的一组数据,其中M是M′与小车中砝码质量之和,|v22-v12|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表格中的△E3=0.600J,W3=0.610J.(结果保留三位有效数字)
(3)根据表,我们在图中的方格纸上作出△E-W图线如图2所示,它说明了拉力(合力)所做的功近似等于物体动能的改变量
0 145803 145811 145817 145821 145827 145829 145833 145839 145841 145847 145853 145857 145859 145863 145869 145871 145877 145881 145883 145887 145889 145893 145895 145897 145898 145899 145901 145902 145903 145905 145907 145911 145913 145917 145919 145923 145929 145931 145937 145941 145943 145947 145953 145959 145961 145967 145971 145973 145979 145983 145989 145997 176998
(1)实验主要步骤如下:
①测量小车和拉力传感器的总质量M′;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;
②将小车停在C点,释放小车,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度.
③在小车中增加砝码,或减少钩码,重复②的操作.
(2)表是他们测得的一组数据,其中M是M′与小车中砝码质量之和,|v22-v12|是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间所做的功.表格中的△E3=0.600J,W3=0.610J.(结果保留三位有效数字)
(3)根据表,我们在图中的方格纸上作出△E-W图线如图2所示,它说明了拉力(合力)所做的功近似等于物体动能的改变量
| 次数 | M/kg | |v22-v12|/(m/s)2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 |
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 |
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
 如图所示是等离子体发电机的示意图,磁感应强度为B,两极板间距离为d,要使输出电压为U,则等离子体的速度v为$\frac{U}{dB}$,a是电源的正极.
如图所示是等离子体发电机的示意图,磁感应强度为B,两极板间距离为d,要使输出电压为U,则等离子体的速度v为$\frac{U}{dB}$,a是电源的正极. 如图所示,子弹从枪口水平射出,在子弹飞行途中有两块平行的薄纸A、B,A与枪口的水平距离为s,B与A的水平距离也为s,子弹击穿A、B后留下弹孔M、N,其高度为h,不计纸和空气阻力,求子弹初速度大小.
如图所示,子弹从枪口水平射出,在子弹飞行途中有两块平行的薄纸A、B,A与枪口的水平距离为s,B与A的水平距离也为s,子弹击穿A、B后留下弹孔M、N,其高度为h,不计纸和空气阻力,求子弹初速度大小. 如图所示,轻质弹簧的劲度系数为20N/cm,用其拉着一个重200N的物体在水平面上运动.当弹簧的伸长量为4cm时,物体恰在水平面上做匀速直线运动.
如图所示,轻质弹簧的劲度系数为20N/cm,用其拉着一个重200N的物体在水平面上运动.当弹簧的伸长量为4cm时,物体恰在水平面上做匀速直线运动. 有一条竖直悬挂起来的长为4.2m的细杆AB,在杆的正下方离B端0.8m的地方有一个水平放置的圆环C,若让杆自由下落(g=10m/s2)求:
有一条竖直悬挂起来的长为4.2m的细杆AB,在杆的正下方离B端0.8m的地方有一个水平放置的圆环C,若让杆自由下落(g=10m/s2)求: