题目内容
【题目】某学习小组利用如图所示的装置探究合外力做功与动能改变的俄关系.
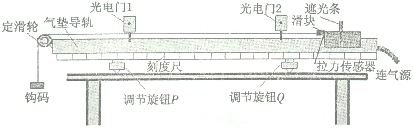
(1)在调整气垫导轨水平时,滑块不挂钩码和细线,判断气垫导轨水平的依据是:___
A.不接通气源,反复调节旋钮P、Q,使滑块静止于导轨上
B.接通气源后,反复调节旋钮P、Q,使滑块静止于导轨的任何位置
C.接通气源后,给滑块一个初速度,反复调节旋钮P、Q,使滑块通过两光电门的时间相等
(2)本实验________满足钩码的质量远小于滑块、遮光条和拉力传感器的总质量.(填“需要”或“不需要”)
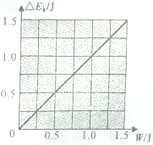
(3)通过多次改变两光电门间的距离得到多组数据,以滑块动能的改变量△Ek为纵坐标,合外力做功W为横坐标在方格纸中作出△Ek-W图像。由图像可得出的结论是_________________________;
(4)请写出可以减少本实验误差的措施:______________。
【答案】 BC 不需要 W∝![]() 或在误差允许范围内,合外力做功等于滑块动能的改变量 ①尽量增加两个光电门间的距离 ②尽量减小避光条的宽度
或在误差允许范围内,合外力做功等于滑块动能的改变量 ①尽量增加两个光电门间的距离 ②尽量减小避光条的宽度
【解析】(1) 在调整气垫导轨水平时,滑块不挂钩码和细线,判断气垫导轨水平的依据是:接通气源后,反复调节旋钮P、Q,使滑块静止于导轨的任何位置或接通气源后,给滑块一个初速度,反复调节旋钮P、Q,使滑块通过两光电门的时间相等,故BC正确;
(2)由动能定理得 ,所以不需满足钩码的质量远小于滑块、遮光条和拉力传感器的总质量;
,所以不需满足钩码的质量远小于滑块、遮光条和拉力传感器的总质量;
(3) 由图像可得出的结论是![]() 或在误差允许范围内,合外力做功等于滑块动能的改变量;
或在误差允许范围内,合外力做功等于滑块动能的改变量;
(4) 由动能定理得 ,可以减少本实验误差的措施是①尽量增加两个光电门间的距离 ②尽量减小避光条的宽度;
,可以减少本实验误差的措施是①尽量增加两个光电门间的距离 ②尽量减小避光条的宽度;

练习册系列答案
 新活力总动员暑系列答案
新活力总动员暑系列答案 龙人图书快乐假期暑假作业郑州大学出版社系列答案
龙人图书快乐假期暑假作业郑州大学出版社系列答案
相关题目