题目内容
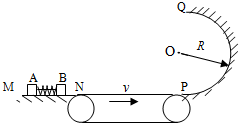 如图所示,光滑的水平导轨MN右端N处与水平传送带平滑连接,传送带长度L=0.8m,以恒定速率v=3.0m/s向右匀速运动.传送带的右端P处平滑连接着在竖直平面内、半径为R=0.4m的光滑半圆轨道PQ.质量均为m=0.2kg A、B两滑块用细绳相连,其间有一压缩轻弹簧,开始时它们以V0=1m/s的速度在水平导轨MN上向右匀速运动.现使细绳断开,弹簧伸展,滑块B脱离弹簧后滑上传送带,从传送带右端滑出并沿半圆轨道运动到最高点Q后水平飞出,又正好落回N点.已知滑块B与传送带之间的动摩擦因数μ=
如图所示,光滑的水平导轨MN右端N处与水平传送带平滑连接,传送带长度L=0.8m,以恒定速率v=3.0m/s向右匀速运动.传送带的右端P处平滑连接着在竖直平面内、半径为R=0.4m的光滑半圆轨道PQ.质量均为m=0.2kg A、B两滑块用细绳相连,其间有一压缩轻弹簧,开始时它们以V0=1m/s的速度在水平导轨MN上向右匀速运动.现使细绳断开,弹簧伸展,滑块B脱离弹簧后滑上传送带,从传送带右端滑出并沿半圆轨道运动到最高点Q后水平飞出,又正好落回N点.已知滑块B与传送带之间的动摩擦因数μ=| 5 | 16 |
(1)滑块B到达Q点时速度的大小;
(2)滑块B在半圆轨道P处对轨道的压力;
(3)压缩的轻弹簧的弹性势能Ep.
分析:(1)据题意,滑块B从Q处飞出后做平抛运动,根据平抛运动的规律,由高度2R和水平位移L求解滑块B到达Q点时速度的大小;
(2)滑块B从P运动到Q过程中,只有重力做功,机械能守恒,即可求出它经过B点的速度,在P点由重力和支持力的合力提供其向心力,根据牛顿运动定律求解滑块B在半圆轨道P处对轨道的压力;
(3)根据滑块B到达P点的速度与传送带速度的关系,分析滑块B在传送带上的运动情况,由牛顿牛顿第二定律和运动学公式求出滑块B在弹簧伸展后的速度.细绳断开,弹簧伸展的过程,B、A、弹簧系统动量守恒和机械能守恒,即可求解压缩的轻弹簧的弹性势能Ep.
(2)滑块B从P运动到Q过程中,只有重力做功,机械能守恒,即可求出它经过B点的速度,在P点由重力和支持力的合力提供其向心力,根据牛顿运动定律求解滑块B在半圆轨道P处对轨道的压力;
(3)根据滑块B到达P点的速度与传送带速度的关系,分析滑块B在传送带上的运动情况,由牛顿牛顿第二定律和运动学公式求出滑块B在弹簧伸展后的速度.细绳断开,弹簧伸展的过程,B、A、弹簧系统动量守恒和机械能守恒,即可求解压缩的轻弹簧的弹性势能Ep.
解答:解:(1).滑块B从Q飞出后做平抛运动,有:
(2m)
L=vQt …(1)
2R=
gt2 …(2)
由(1)(2)解得 vQ=2m/s.
(2).滑块B从P运动到Q过程中满足机械能守恒,有:
m
+2mgR=
m
…(3)
在P点有:N-mg=
…(4)
由(3)(4)解得:N=12N
根据牛顿第三定律得:滑块B在半圆轨道P处对轨道的压力N′=N=12N,方向竖直向下;
3.由(3)得:vP=
=2
m/s,故可知滑块B在皮带上做匀减速运动,加速度:
a=-
=-μg …(5)
又
-
=2aL …(6)
细绳断开后弹簧伸展过程,A、B组成的系统动量守恒:2mv0=mvN+mvA …(7)
轻弹簧与A、B组成的系统能量守恒:Ep+
(2m)
=
m
+
m
…(8)
由(5)(6)(7)(8)解得:弹簧的弹性势能:Ep=3.4J
答:
(1)滑块B到达Q点时速度的大小是2m/s;
(2)滑块B在半圆轨道P处对轨道的压力是12N;
(3)压缩的轻弹簧的弹性势能Ep是3.4J.
| 1 |
| 2 |
| v | 2 0 |
L=vQt …(1)
2R=
| 1 |
| 2 |
由(1)(2)解得 vQ=2m/s.
(2).滑块B从P运动到Q过程中满足机械能守恒,有:
| 1 |
| 2 |
| v | 2 Q |
| 1 |
| 2 |
| v | 2 P |
在P点有:N-mg=
m
| ||
| R |
由(3)(4)解得:N=12N
根据牛顿第三定律得:滑块B在半圆轨道P处对轨道的压力N′=N=12N,方向竖直向下;
3.由(3)得:vP=
|
| 5 |
a=-
| f |
| m |
又
| v | 2 P |
| v | 2 N |
细绳断开后弹簧伸展过程,A、B组成的系统动量守恒:2mv0=mvN+mvA …(7)
轻弹簧与A、B组成的系统能量守恒:Ep+
| 1 |
| 2 |
| v | 2 0 |
| 1 |
| 2 |
| v | 2 N |
| 1 |
| 2 |
| v | 2 A |
由(5)(6)(7)(8)解得:弹簧的弹性势能:Ep=3.4J
答:
(1)滑块B到达Q点时速度的大小是2m/s;
(2)滑块B在半圆轨道P处对轨道的压力是12N;
(3)压缩的轻弹簧的弹性势能Ep是3.4J.
点评:本题综合了牛顿运动定律、平抛运动、机械能守恒定律、动量守恒定律等多方面的知识,分析过程,把握解题规律是关键.难度适中.

练习册系列答案
相关题目
 (2011?河北模拟)如图所示,光滑的水平地面上有一木板,其左端放有一重物,右方有一竖直的墙.重物质量为木板质量的2倍,重物与木板间的动摩擦因数为μ.使木板与重物以共同的速度v0向右运动,某时刻木板与墙发生弹性碰撞,碰撞时间极短.求木板从第一次与墙碰撞到再次碰撞所经历的时间.设木板足够长,重物始终在木板上.重力加速度为g.
(2011?河北模拟)如图所示,光滑的水平地面上有一木板,其左端放有一重物,右方有一竖直的墙.重物质量为木板质量的2倍,重物与木板间的动摩擦因数为μ.使木板与重物以共同的速度v0向右运动,某时刻木板与墙发生弹性碰撞,碰撞时间极短.求木板从第一次与墙碰撞到再次碰撞所经历的时间.设木板足够长,重物始终在木板上.重力加速度为g.
 (2010?济南模拟)如图所示,光滑的水平地面上有三块材料完全相同的木块A、B、C,质量均为m.中间用细绳l、2连接,现用一水平恒力F作用在C上,三者开始一起做匀加速运动,运动过程中把一块橡皮泥粘在某一木块上面,系统仍加速运动,则下列说法正确的是( )
(2010?济南模拟)如图所示,光滑的水平地面上有三块材料完全相同的木块A、B、C,质量均为m.中间用细绳l、2连接,现用一水平恒力F作用在C上,三者开始一起做匀加速运动,运动过程中把一块橡皮泥粘在某一木块上面,系统仍加速运动,则下列说法正确的是( ) 如图所示,光滑的水平地面上有一较薄的木板,其左端放有一重物,重物可看成质点.右方有一竖直的墙?重物质量为木板质量的2倍,重物与木板间的动摩擦因数为μ,重力加速度为g,使木板与重物以共同的速度v0向右运动,木板长度为
如图所示,光滑的水平地面上有一较薄的木板,其左端放有一重物,重物可看成质点.右方有一竖直的墙?重物质量为木板质量的2倍,重物与木板间的动摩擦因数为μ,重力加速度为g,使木板与重物以共同的速度v0向右运动,木板长度为 如图所示.光滑的水平绝缘细杆上套有一圆形的光滑铜环处于静止状态.现在使条形磁铁沿铜环的轴线向左运动,在条形磁铁的N极向左运动至铜环所在竖直平面的过程中,下列说法正确的是( )
如图所示.光滑的水平绝缘细杆上套有一圆形的光滑铜环处于静止状态.现在使条形磁铁沿铜环的轴线向左运动,在条形磁铁的N极向左运动至铜环所在竖直平面的过程中,下列说法正确的是( )| A、铜环中感应电流为图中箭头方向,铜环向右运动 | B、铜环中感应电流与图中箭头方向相反,铜环向左运动 | C、铜环中感应电流与图中箭头方向相反,铜环向右运动 | D、铜环中感应电流为图中箭头方向,铜环向左运动 |