题目内容
如图所示,质量为m的物体静止在倾角为θ的斜面上,物体与斜面间的动摩擦因数为μ,现使斜面水平向左以速度v匀速移动距离l. (物体与斜面相对静止),以下说法正确的是( )
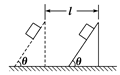
| A.斜面体对物体做的总功是0 |
| B.重力对物体做的功为mgl |
| C.摩擦力对物体做的功为μmglcosθ |
| D.斜面对物体的支持力做功的功率为mgvcosθ |
A
试题分析:物体匀速运动,所以受力平衡,物体受到重力、支持力和摩擦力的作用,由力的合成可知摩擦力与支持力的合力竖直向上,故斜面体对物体做的总功是0,A对;同理由于重力与位移方向垂直,所以重力做功为零,B错;摩擦力大小为
 ,在水平方向分力为
,在水平方向分力为 ,摩擦力做功为
,摩擦力做功为 ,C错;斜面对物体的支持力为
,C错;斜面对物体的支持力为 ,在水平方向的分力为
,在水平方向的分力为 ,由P=Fv可知功率为
,由P=Fv可知功率为 ,D错;故选A
,D错;故选A点评:本题难度较小,计算功W=Fs时,注意F为s方向上的分力或s为F方向上的分位移,在利用P=Fv求解功率时v为F方向上的分速度

练习册系列答案
相关题目
 mgL
mgL mgL
mgL mgL
mgL