题目内容
【题目】如图,已知气垫导轨上滑块的质量为M,钩码的质量为m,遮光条宽度为d,两光电门间的距离为L。在绳子上装上拉力传感器(图中未画出),气源开通后,滑块在牵引力的作用下运动,遮光条先后通过两个光电门的挡光时间为![]() 和
和![]() ,取当地重力加速度为g:
,取当地重力加速度为g:
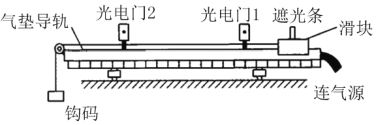
(1)用上述装置探究滑块加速度a与其质量M及绳子拉力F的关系,下列做法正确的是___________;
A. 应控制钩码的质量m远小于滑块的质量M
B. 可更换更宽的遮光条以减小实验误差
C. 应调节滑轮高度使连接滑块的细线与轨道平行
D. 还应测出滑块从光电门1到光电门2的时间
(2)还可用上述装置探究系统在运动过程中的机械能关系。滑块从光电门1运动到光电门2的过程中,满足关系式___________时(用题干中的已知量表示),“钩码一滑块”系统机械能守恒。
【答案】C 
【解析】
(1)[1]A.由题知,在绳子上装有拉力传感器(图中未画出),拉力可以直接读出,故不需要控制钩码的质量m远小于滑块的质量M,故A错误;
B.为了减小实验的误差,应更换更窄的遮光条,故B错误。
C.实验时应调节滑轮高度使连接滑块的细线与轨道平行,使拉力为合外力,故C正确。
D.根据极短时间内的平均速度等于瞬时速度求出滑块通过两光电门的瞬时速度,结合两光电门间的距离L,根据速度位移公式求出加速度,不需要测量滑块从光电门1到光电门2的时间,故D错误。
故选C。
(2)[2]滑块通过两光电门的瞬时速度为
![]() ,
,![]()
系统重力势能的减小量为
![]()
系统动能的增加量为

若满足关系式
则“钩码一滑块”系统机械能守恒。

练习册系列答案
 口算题卡加应用题集训系列答案
口算题卡加应用题集训系列答案
相关题目