题目内容
13. 金属杆AB处于磁感强度B=1T的匀强磁场中,磁场方向垂直纸面向里.已知AB=20cm,当金属杆以速度v=10m/s按图中标明的方向运动时,则A、B两点间的电势差为( )
金属杆AB处于磁感强度B=1T的匀强磁场中,磁场方向垂直纸面向里.已知AB=20cm,当金属杆以速度v=10m/s按图中标明的方向运动时,则A、B两点间的电势差为( )| A. | -2.0V | B. | 2.0V | C. | -200V | D. | 200V |
分析 由E=BLv求出感应电动势,由右手定则判断出电势高低.即可求解.
解答 解:AB产生的感应电动势为 E=BLv=1×0.2×10V=2V
由右手定则知A端的电势比B端的电势高,所以A、B两点间的电势差 UAB=E=2V
故选:B
点评 本题考查了求电势差、判断电势高低,应用E=BLv、右手定则即可正确解题;解题时要注意电势差有正负,求电势差时要注意电势的高低.

练习册系列答案
相关题目
3. 如图所示有三个斜面1、2、3,斜面1与2底边相同,斜面2和3高度相同,同一物体与三个斜面的动摩擦因数相同,他们分别沿三个斜面从顶端由静止下滑到底端,下列说法正确的是( )
如图所示有三个斜面1、2、3,斜面1与2底边相同,斜面2和3高度相同,同一物体与三个斜面的动摩擦因数相同,他们分别沿三个斜面从顶端由静止下滑到底端,下列说法正确的是( )
如图所示有三个斜面1、2、3,斜面1与2底边相同,斜面2和3高度相同,同一物体与三个斜面的动摩擦因数相同,他们分别沿三个斜面从顶端由静止下滑到底端,下列说法正确的是( )| A. | 到达底端的速度v1=v2<v3 | |
| B. | 损失的机械能△E1=△E2>△E3 | |
| C. | 到达斜面底端时重力的瞬时功率P1>P2>P3 | |
| D. | 沿斜面运动的时间t1>t2>t3 |
4. 2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上,中同科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军,改写了我国服务机器人从未进人世界前5的纪录,标志着我国在该领域的研究取得了重要进展.图中是科大著名服务机器人“可佳”,如图所示,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1 )沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点(5,5)沿直线运动到点(2,2).整个过程中机器人所用时间为2s.则( )
2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上,中同科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军,改写了我国服务机器人从未进人世界前5的纪录,标志着我国在该领域的研究取得了重要进展.图中是科大著名服务机器人“可佳”,如图所示,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1 )沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点(5,5)沿直线运动到点(2,2).整个过程中机器人所用时间为2s.则( )
2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上,中同科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军,改写了我国服务机器人从未进人世界前5的纪录,标志着我国在该领域的研究取得了重要进展.图中是科大著名服务机器人“可佳”,如图所示,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1 )沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点(5,5)沿直线运动到点(2,2).整个过程中机器人所用时间为2s.则( )| A. | 机器人的运动轨迹是一条直线 | |
| B. | 整个过程中机器人的路程为2$\sqrt{2}$m | |
| C. | 整个过程中机器人的平均速度大小为1m/s | |
| D. | 整个过程中机器人的位移大小为2$\sqrt{2}$m |
1.关于线圈在匀强磁场中转动产生的交变电流,以下说法中正确的是( )
| A. | 线圈每转动一周,感应电流方向就改变两次 | |
| B. | 线圈每转动一周,感应电动势和感应电流方向都要改变一次 | |
| C. | 线圈平面经过中性面一次,感应电动势和感应电流的方向都要改变一次 | |
| D. | 线圈平面每经过中性面一次,感应电流方向就改变一次,感应电动势方向不变 |
 已知一辆汽车在平直公路上运动,它的位移(s)-时间(t)图象如图所示.
已知一辆汽车在平直公路上运动,它的位移(s)-时间(t)图象如图所示.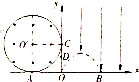 如图所示的xOy平面,在第二象限有一半径为R的匀强磁场区域,圆心为O′(-R,R),磁场方向垂直xOy平面向外,磁感应强度为B.在第一象限的虚线上方存在一沿y轴负方向的匀强电场,虚线为电场的边界,其方程为y=$\frac{8}{3R}$x(R-x).在A点有一粒子源,能不断向x轴上方各个方向均匀发射质量为m,电荷量为q(q>0)的同种带电粒子,所有粒子发射速率相同.已知沿y轴正方向入射的粒子通过C点(0,R)后,沿与x轴正方形成53°角方向斜向下打到B点,B、D点坐标分别为(R,0),(O,$\frac{R}{2}$),不计粒子间的相互作用和重力.sin53°=0.8,cos53°=0.6.求:
如图所示的xOy平面,在第二象限有一半径为R的匀强磁场区域,圆心为O′(-R,R),磁场方向垂直xOy平面向外,磁感应强度为B.在第一象限的虚线上方存在一沿y轴负方向的匀强电场,虚线为电场的边界,其方程为y=$\frac{8}{3R}$x(R-x).在A点有一粒子源,能不断向x轴上方各个方向均匀发射质量为m,电荷量为q(q>0)的同种带电粒子,所有粒子发射速率相同.已知沿y轴正方向入射的粒子通过C点(0,R)后,沿与x轴正方形成53°角方向斜向下打到B点,B、D点坐标分别为(R,0),(O,$\frac{R}{2}$),不计粒子间的相互作用和重力.sin53°=0.8,cos53°=0.6.求: 如图所示,光滑斜面倾角为37°.质量为m、电荷量为q的一带有正电的小物块,置于斜面上.当沿水平方向加有如图所示的匀强电场时,带电小物块恰好静止在斜面上,从某时刻开始,电场强度变为原来的$\frac{1}{2}$,求:
如图所示,光滑斜面倾角为37°.质量为m、电荷量为q的一带有正电的小物块,置于斜面上.当沿水平方向加有如图所示的匀强电场时,带电小物块恰好静止在斜面上,从某时刻开始,电场强度变为原来的$\frac{1}{2}$,求: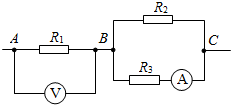 如图所示电路中.已知R1=5Ω,R3=12Ω,理想电压表示数为2V,理想电流表示数为0.2A,则电阻R2为多少?UAC为多少?
如图所示电路中.已知R1=5Ω,R3=12Ω,理想电压表示数为2V,理想电流表示数为0.2A,则电阻R2为多少?UAC为多少?
16. 一定质量的理想气体状态变化过程如图所示,第1种变化是从A到B,第2种变化是从A到C,比较两种变化过程( )
一定质量的理想气体状态变化过程如图所示,第1种变化是从A到B,第2种变化是从A到C,比较两种变化过程( )
一定质量的理想气体状态变化过程如图所示,第1种变化是从A到B,第2种变化是从A到C,比较两种变化过程( )| A. | 两个过程气体吸收热量一样 | B. | 两个过程气体内能增加不相同 | ||
| C. | A到C过程气体吸收热量较多 | D. | A到B过程气体吸收热量较多 |