题目内容
4.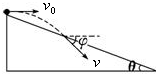 如图所示,一物体自倾角为θ的固定斜面顶端沿水平方向抛出后落在斜面上,物体与斜面接触时速度与水平方向的夹角为Φ,速度方向与斜面的夹角为α.下列说法中正确的是( )
如图所示,一物体自倾角为θ的固定斜面顶端沿水平方向抛出后落在斜面上,物体与斜面接触时速度与水平方向的夹角为Φ,速度方向与斜面的夹角为α.下列说法中正确的是( )| A. | θ和Φ的关系式为tanΦ=sinθ | B. | θ和Φ的关系式为tanΦ=2tanθ | ||
| C. | 若平抛的初速度增大,则α将增大 | D. | 若平抛的初速度增大,则α将减小 |
分析 Φ为速度与水平方向的夹角,tanΦ为竖直速度与水平速度之比;θ为平抛运动位移与水平方向的夹角,tanθ为竖直位移与水平位移之比.
解答 解:竖直速度与水平速度之比为:tanΦ=$\frac{gt}{{v}_{0}}$
竖直位移与水平位移之比为:tanθ=$\frac{\frac{1}{2}g{t}^{2}}{{v}_{0}t}$=$\frac{gt}{2{v}_{0}}$
故tanΦ=2tanθ
故选:B
点评 解决本题的关键平抛运动分运动的规律,在理解的基础上掌握速度与水平方向夹角的正切值是位移与水平方向夹角正切值的2倍.

练习册系列答案
相关题目
14.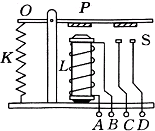 如图所示为小型电磁继电器的构造示意图,其中L为含铁芯的线圈.P为可经O点转动的铁片,K为弹簧,S为一对触头,A、B、C、D为四个接线柱.电磁继电器与传感器配合,可完成自动控制的要求.其工作方式是( )
如图所示为小型电磁继电器的构造示意图,其中L为含铁芯的线圈.P为可经O点转动的铁片,K为弹簧,S为一对触头,A、B、C、D为四个接线柱.电磁继电器与传感器配合,可完成自动控制的要求.其工作方式是( )
如图所示为小型电磁继电器的构造示意图,其中L为含铁芯的线圈.P为可经O点转动的铁片,K为弹簧,S为一对触头,A、B、C、D为四个接线柱.电磁继电器与传感器配合,可完成自动控制的要求.其工作方式是( )| A. | A与B接信号电压,C与D可跟被控电路串联 | |
| B. | A与B接信号电压,C与D可跟被控电路并联 | |
| C. | C与 D接信号电压,A与B可跟被控电路串联 | |
| D. | C与 D接信号电压,A与B可跟被控电路并联 |
15. 一位同学做“探究单摆周期与摆长的关系”的实验,他将摆球挂起后,进行了如下步骤:
一位同学做“探究单摆周期与摆长的关系”的实验,他将摆球挂起后,进行了如下步骤:
A.测摆长L:用米尺量出摆线长度;
B.测周期T:将摆球拉起一个小角度,然后放开,在摆球某次通过最低点时,按下秒表开始计时,同时将此次通过最低点作为第一次,接着一直数到摆球第60次通过最低点时,按秒表停止计时,读出这段时间t,计算出单摆的振动周期T=$\frac{t}{60}$;
C.改变摆长,重复上述步骤几次;
D.数据分析:.该同学经实验测量得到一组数据,如表所示:
(1)请根据上表中的数据在如图坐标纸上做出合适的图线,并根据图线判定L与T2的关系为:T2∝L.(坐标纸见上面)
(2)指出上面A、B步骤中遗漏或错误的地方:
①步骤A中应用游标卡尺测出摆球直径,摆长应为摆线长加上摆球的半径
②步骤B中单摆周期T计算式应是$T=\frac{t}{29.5}$..
一位同学做“探究单摆周期与摆长的关系”的实验,他将摆球挂起后,进行了如下步骤:A.测摆长L:用米尺量出摆线长度;
B.测周期T:将摆球拉起一个小角度,然后放开,在摆球某次通过最低点时,按下秒表开始计时,同时将此次通过最低点作为第一次,接着一直数到摆球第60次通过最低点时,按秒表停止计时,读出这段时间t,计算出单摆的振动周期T=$\frac{t}{60}$;
C.改变摆长,重复上述步骤几次;
D.数据分析:.该同学经实验测量得到一组数据,如表所示:
| 摆长L(m) | 0.800 | 0.90 | 1.000 | 1.100 | 1.200 |
| 周期T(s) | 1.79 | 1.90 | 2.00 | 2.10 | 2.20 |
| T2(s2) | 3.20 | 3.61 | 4.00 | 4.41 | 4.84 |
(2)指出上面A、B步骤中遗漏或错误的地方:
①步骤A中应用游标卡尺测出摆球直径,摆长应为摆线长加上摆球的半径
②步骤B中单摆周期T计算式应是$T=\frac{t}{29.5}$..
 如图所示,一滑雪坡由斜面AB和圆弧面BC组成,BC圆弧面和斜面相切于B,与水平面相切于C,竖直台阶CD底端与倾角为θ的斜坡DE相连.第一次运动员从A点由静止滑下通过C点后飞落到DE上,第二次从AB间的某处由静止滑下通过C点后也飞落到DE上,不计空气阻力和轨道的摩擦力,运动员两次空中飞行时间t1和t2,则t1>t2;两次接触时速度与水平方向的夹角分别为β1和β2,则β1<β2.(选填“>”、“=”或“<”).
如图所示,一滑雪坡由斜面AB和圆弧面BC组成,BC圆弧面和斜面相切于B,与水平面相切于C,竖直台阶CD底端与倾角为θ的斜坡DE相连.第一次运动员从A点由静止滑下通过C点后飞落到DE上,第二次从AB间的某处由静止滑下通过C点后也飞落到DE上,不计空气阻力和轨道的摩擦力,运动员两次空中飞行时间t1和t2,则t1>t2;两次接触时速度与水平方向的夹角分别为β1和β2,则β1<β2.(选填“>”、“=”或“<”).
9.在正在绕地球运行的人造卫星系统内,下列仪器还可以使用的有( )
| A. | 天平 | B. | 弹簧测力计 | C. | 密度计 | D. | 气压计 |
 在测量电源的电动势和内阻实验中,由于所用的电压表(视为理想电压表)的量程较小,某同学设计了如图所示的实物电路.根据实验数据描点,绘出的$\frac{1}{U}$-R图象是一条直线,若直线的斜率为k,在坐标轴上的截距为b,则该电源的电动势E=$\frac{1}{k{R}_{0}}$,内阻r=$\frac{b}{k}-{R}_{0}$(用k、b和R0表示)
在测量电源的电动势和内阻实验中,由于所用的电压表(视为理想电压表)的量程较小,某同学设计了如图所示的实物电路.根据实验数据描点,绘出的$\frac{1}{U}$-R图象是一条直线,若直线的斜率为k,在坐标轴上的截距为b,则该电源的电动势E=$\frac{1}{k{R}_{0}}$,内阻r=$\frac{b}{k}-{R}_{0}$(用k、b和R0表示)
13.在一次跳伞训练中,伞兵从悬停在空中的直升机上跳出后,初速度为v0>0,加速度a>0,下降过程中a值不断减小直至为零时,该伞兵的( )
| A. | 速度不断减小,位移先增大后减小 | |
| B. | 速度不断减小,最后做匀速直线运动 | |
| C. | 速度不断增大,当a=0时,位移达到最大值 | |
| D. | 速度不断增大,当a=0时,速度达到最大,位移不断增大 |