题目内容
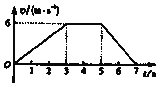
【题目】如图,足够长的水平传送带以恒定速率运行。将一滑块从传送带左端由静止轻轻放上传送带,滑块将先加速运动一段距离,滑块与传送带间的滑动摩擦力记作f。下列判断正确的是( )
![]()
A. 传送带功率始终不变
B. 摩擦力f对物块所做的功等于滑块增加的动能
C. 摩擦力f对滑块和传送带所做的总功等于传送带输出的机械能
D. 传送带克服摩擦力f所做的功等于滑块与传送带接触面上摩擦产生的热
【答案】B
【解析】
A、由于水平传送带足够长,所以滑块将先匀加速运动后做匀速直线运动,物块先受摩擦力作用后不受摩擦力作用,所以传送带受力发生改变,而水平传送速率不变,根据传送带做功的功率![]() 可知传送带功率发生改变,故A错误;
可知传送带功率发生改变,故A错误;
B、根据动能定理可得摩擦力f对物块所做的功等于滑块增加的动能,故B正确;
C、摩擦力f对滑块所做的功为![]() ,摩擦力f对传送带所做的功
,摩擦力f对传送带所做的功![]() ,滑块与传送带接触面上摩擦产生的热为
,滑块与传送带接触面上摩擦产生的热为![]() ,所以摩擦力f对滑块和传送带所做的总功等于滑块与传送带接触面上摩擦产生的热,故C错误;
,所以摩擦力f对滑块和传送带所做的总功等于滑块与传送带接触面上摩擦产生的热,故C错误;
D、根据功能原理可得传送带克服摩擦力f所做的功等于传送带输出的机械能,故D错误;
故选B。

 期末1卷素质教育评估卷系列答案
期末1卷素质教育评估卷系列答案
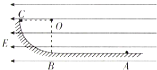


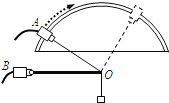
【题目】如图所示,某小组同学利用DIS实验装置研究支架上力的分解.A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰链连接长0.3m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下步骤操作:
①测量绳子与水平杆的夹角∠AOB=θ
②对两个传感器进行调零
③用另一绳在O点悬挂在一个钩码,记录两个传感器读数
④取下钩码,移动传感器A改变θ角
重复上述①②③④,得到图示表格a.
(1)根据表格a,A传感器对应的是表中力______(填“F1”或“F2”).钩码质量为______kg(保留1位有效数字).
F1 | 1.001 | 0.580 | … | 1.002 | … |
F2 | -0.868 | -0.291 | … | 0.865 | … |
θ | 30° | 60° | … | 150° | … |
(2)(单选题)本实验中多次对传感器进行调零,对此操作说明正确的是______
A.因为事先忘记调零
B.何时调零对实验结果没有影响
C.为了消除横杆自身重力对结果的影响
D.可以完全消除实验的误差.