题目内容
17.如图所示,EF为水平地面,O点左侧是粗糙的、右侧是光滑的.一轻质弹簧右端与墙壁固定,左端与静止在O点质量为m的小物块A连结,弹簧处于原长状态.质量为m的物块B在大小为F的水平恒力作用下由C处从静止开始向右运动,已知物块B与地面EO段间的滑动摩擦力大小为$\frac{F}{4}$,物块B运动到O点与物块A相碰并一起向右运动(设碰撞时间极短),A、B虽接触而不粘连,当运动到D点时撤去外力F.已知CO 长度为4S,OD 长度为S,整个过程中弹簧都在其弹性限度内.求撤去外力后: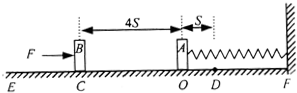
(1)弹簧的最大弹性势能;
(2)物块B最终离O点的距离.
分析 (1)根据动能定理求出B与A碰撞前的速度,结合动量守恒定律求出碰后的速度,结合能量守恒求出弹性势能的最大值.
(2)根据机械能守恒求出物块B离开弹簧时的速度,结合动能定理求出物块B最终离O点的距离.
解答 解:(1)B与A碰撞前速度由动能定理得:$W=(F-\frac{1}{4}F)•4s=\frac{1}{2}m{{v}_{0}}^{2}$,
得:${v}_{0}=\sqrt{2•\frac{(F-\frac{1}{4}F)}{m}•4s}=\sqrt{\frac{6Fs}{m}}$.
B与A碰撞,由动量守恒定律有:mv0=2mv1,
解得:${v}_{1}=\frac{1}{2}\sqrt{\frac{6Fs}{m}}$.
碰后到物块A、B运动至速度减为零,弹簧的最大弹性势能为:
${E}_{pm}=Fs+\frac{1}{2}×2m{{v}_{1}}^{2}$=$\frac{5}{2}Fs$.
(2)设撤去F后,A、B一起回到O点时的速度为v2,由机械能守恒得:
${E}_{pm}=\frac{1}{2}•2m{{v}_{2}}^{2}$,
解得:${v}_{2}=\sqrt{\frac{5Fs}{2m}}$.
返回至O点时,A、B开始分离,B在滑动摩擦力作用下向左作匀减速直线运动,设物块B最终离O点最大距离为x,由动能定理得:
$-\frac{1}{4}Fx=0-\frac{1}{2}m{{v}_{2}}^{2}$.
代入数据解得:x=5s.
答:(1)弹簧的最大弹性势能为$\frac{5}{2}Fs$;
(2)物块B最终离O点的距离为5s.
点评 本题考查了动能定理和能量守恒定律、动量守恒定律的综合运用,综合性较强,对学生的能力要求较高,关键理清物体的运动过程,选择合适的规律进行求解.

 数学奥赛暑假天天练南京大学出版社系列答案
数学奥赛暑假天天练南京大学出版社系列答案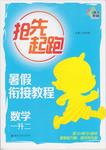 南大教辅抢先起跑暑假衔接教程南京大学出版社系列答案
南大教辅抢先起跑暑假衔接教程南京大学出版社系列答案 (多选)电阻为1Ω的单匝矩形线圈绕垂直于磁场方向的轴,在匀强磁场中匀速转动,产生的交变电动势随时间变化的图象如图所示,现把交变电流加在电阻为9Ω的电热丝上,下列判断正确的是( )
(多选)电阻为1Ω的单匝矩形线圈绕垂直于磁场方向的轴,在匀强磁场中匀速转动,产生的交变电动势随时间变化的图象如图所示,现把交变电流加在电阻为9Ω的电热丝上,下列判断正确的是( )| A. | 线圈转动的角速度为100 rad/s | |
| B. | 在0~0.005 s时间内,通过电阻的电荷量为$\frac{1}{5π}$ C | |
| C. | 电热丝两端的电压为180 V | |
| D. | 电热丝的发热功率为1 800 W |
 某实验小组利用无线力传感器和光电门传感器探究“动能定理”.将无线力传感器和档光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.
某实验小组利用无线力传感器和光电门传感器探究“动能定理”.将无线力传感器和档光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.(1)实验主要步骤如下:
| 次数 | M/kg | |v22-v12|/m2s-2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.22 | W3 |
| 4 | 1.00 | 2.40 | 1.20 | 2.42 | 1.21 |
| 5 | 1.00 | 2.84 | 1.42 | 2.86 | 1.43 |
②把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离;
③改变小车的质量或重物的质量,重复②的操作.
(2)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600J,W3=0.610J(结果保留三位有效数字).
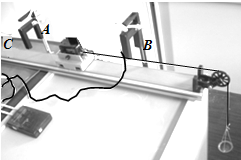
 如图,让一价氢离子,一价氦离子和二价氦离子的混合物经过电压为U的加速电场由静止开始加速,垂直进入场强为E,宽度为L的偏转电场,之后进入磁感强度为B,方向垂直纸面向外的匀强磁场.试求:(已知氢的质量为m0,氦的质量为4m0,元电荷的电荷量为e)
如图,让一价氢离子,一价氦离子和二价氦离子的混合物经过电压为U的加速电场由静止开始加速,垂直进入场强为E,宽度为L的偏转电场,之后进入磁感强度为B,方向垂直纸面向外的匀强磁场.试求:(已知氢的质量为m0,氦的质量为4m0,元电荷的电荷量为e)| A. | 0.5小时 | B. | 1.4小时 | C. | 4.2小时 | D. | 12.6小时 |
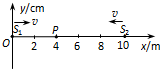 如图所示,均匀介质中两波源S1、S2,分别位于x轴上x1=0、x2=10m处,在t=0时刻同时从各自平衡位置开始沿y轴正方向做简谐运动,周期均为T=1s,产生的机械波的传播速度均为v=4m/s,振幅均为A=2cm.质点P位于x轴上xp=4m处,设质点P从t=0到t=2.5s内通过的路程为L,在t=3.25s时刻的位置为y,则( )
如图所示,均匀介质中两波源S1、S2,分别位于x轴上x1=0、x2=10m处,在t=0时刻同时从各自平衡位置开始沿y轴正方向做简谐运动,周期均为T=1s,产生的机械波的传播速度均为v=4m/s,振幅均为A=2cm.质点P位于x轴上xp=4m处,设质点P从t=0到t=2.5s内通过的路程为L,在t=3.25s时刻的位置为y,则( )| A. | L=4 cm | B. | L=12 cm | C. | y=2 cm | D. | y=-2 cm |
| A. | 楞次发现了电流热效应的规律 | |
| B. | 库仑得到了真空中点电荷相互作用的规律 | |
| C. | 奥斯特发现了电流的磁效应,并总结出了右手螺旋定则 | |
| D. | 亚里士多德将斜面实验的结论合理外推,证明了自由落体运动是匀变速直线运动 |
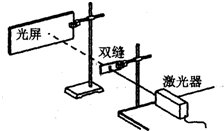 如图所示是用激光器、缝间距可调节的双缝屏、光屏等器材研究光的干涉现象的装置.
如图所示是用激光器、缝间距可调节的双缝屏、光屏等器材研究光的干涉现象的装置.