题目内容
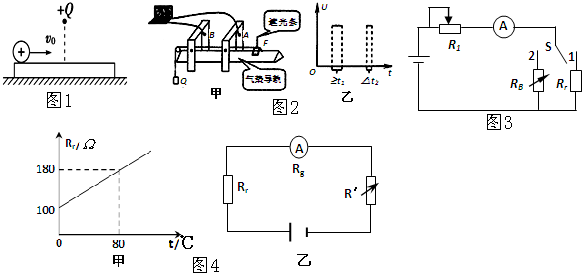
某学习小组利用气垫导轨验证机械能守恒定律,实验装置如图甲所示。在气垫导轨上相隔一定距离的两处安装两个光电传感器A、B,滑块P上固定一遮光条,若光线被遮光条遮挡,光电传感器会输出高电压,两光电传感器采集数据后与计算机相连。滑块在细线的牵引下向左加速运动,遮光条经过光电传感器A、B时,通过计算机可以得到如图乙所示的电压U随时间t变化的图象。
①实验前,接通气源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,当图乙中的Δt1 Δt2(选填“>”、“=”或“<”)时,说明气垫导轨已经水平。
②用螺旋测微器测遮光条宽度d,测量结果如图丙所示,则d = mm。
③滑块P用细线跨过气垫导轨的定滑轮与质量为m的钩码Q相连,将滑块P由图甲所示位置释放,通过计算机得到的图象如图乙所示,若Δt1、Δt2和d已知,要验证滑块和钩码组成的系统机械能是否守恒,还应测出 和 (写出物理量的名称及符号)。
④若上述物理量间满足关系式 ,则表明在上述过程中,滑块和钩码组成的系统机械能守恒。
 |
① Δt1=Δt2 (2分)
② 8.474(在8.473~8.475之间均算对)(2分)
③ 滑块质量M 两光电门间距离L(每空2分)
④ ![]() (2分)
(2分)

练习册系列答案
相关题目


 (1)为测定一节干电池的电动势和内阻,用如图所示电路.
(1)为测定一节干电池的电动势和内阻,用如图所示电路.
