��Ŀ����
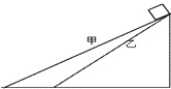
����Ŀ������ͼ��ʾװ�ò⻬����Ļ�еЧ�ʣ���֪������Ϊ5.4N,��ô��
��1��ʵ��ʱ�������ɲ�����Ӧע��__________��
��2�������������߶�Ϊ10cm�����ɲ����Ƶ�ʾ����ͼ��ʾ�����������Ĺ�Ϊ_______J��
��3����ʱ������Ļ�еЧ����______________��
��4�������������أ��û�����Ļ�еЧ�ʽ�_____����������С�����䡱����
��5������ʵ�鲻�������غ�Ħ�����ô˻���������8.2ţ������ʱ���еЧ����_______________��
���𰸡���ֱ���� 0.72 75% ��� 82%
��������
��һ�գ�ʵ��ʱӦע����ֱ���������������ɲ����ƣ�����ϵͳ����ƽ��״̬�������ŵ��ڲ�����ʾ����
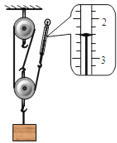
�ڶ��գ���ͼ֪�������ӵ���Ч����Ϊ3���������ɶ��ƶ��ľ���Ϊ���������߶�h��3���������������߶�Ϊ10cm�����������ɶ�ͨ���ľ����ǣ�
s=3h=30cm=0.3m��
��ͼ֪�������ɲ����Ƶķֶ�ֵΪ0.2N������Ϊ2.4N�����������Ĺ��ǣ�
W=Fs=2.4N��0.3m=0.72J��
�����գ����ӵ���Ч����Ϊ3���������ɶ��ƶ��ľ���Ϊ���������߶�h��3������
s=3h��
������Ļ�еЧ���ǣ�![]()
���Ŀգ���ͬһ������Ѳ�ͬ����������ͬһ�߶�ʱ�����������ͬ�������������أ������������ù��������ù����ܹ�����ռ�ı�������ˣ��ʻ�еЧ�ʱ��
����գ����������غ�Ħ������![]() ���ɴ˽�ö����ֵ������ǣ�
���ɴ˽�ö����ֵ������ǣ�![]()
���ô˻���������8.2ţ������ʱ�����еЧ���ǣ� ��
��