题目内容
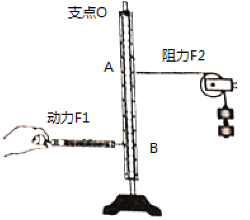
【题目】如图是探究杠杆平衡条件的几个实验情景。
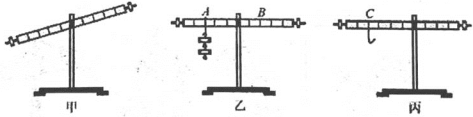
(1)为了在实验中方便读取力臂,探究前和探究过程中我们都应将杠杆调整到____________ 位置平衡。挂钩码前,杠杆在如图甲所示的位置静止,接下来应杠杆两端的螺母适当向_________(选填“左”或“右”)调解。
(2)如图乙,A点挂有2个重力均为0.5N的钩码。为了让杠杆在实验所需要的位置平衡, 应在支点右侧B点(第2格处)挂_________个相同的钩码(每个钩码重均为0.5N)。
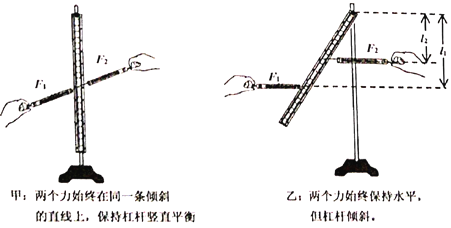
(3)改变钩码个数及力臂,多次实验得出结论:杠杆的平衡条件是:__________________。多次实验是为了使实验结论具有_____________性。
(4)如图丙,现给你一个量程为02N的弹簧测力计,若干个重力均为0.5N的钩码。钩码挂在C点处,现使用弹簧测力计和钩码使杠杆在水平位置平衡(不计杠杆自重对实 验的影响),则在C点处所挂钩码的最多个数为__________________个。
【答案】水平 右 3 动力×动力臂=阻力×阻力臂(或![]() ) 普遍 6
) 普遍 6
【解析】
第一空.当杠杆位于水平位置平衡时,力臂与杠杆重合,可以方便的测量出力臂的大小;
第二空.由图甲可知杠杆左端向下倾斜,因此应向右调节平衡螺母;
第三空.由杠杆平衡条件![]() 可得:
可得:
![]()
因此应挂3个钩码;
第四空.多次测量总结数据规律可得出,杠杆平衡条件为![]() 即动力×动力臂=阻力×阻力臂;
即动力×动力臂=阻力×阻力臂;
第五空.多次实验在物理中有两个目的①使实验结论具有普遍性,避免偶然性②多次测量取平均值,本次实验多次测量的主要目的是使实验结论具有普遍性,避免偶然性;
第六空.由杠杆平衡条件![]() 知力臂越长越省力,当在杠杆最左端用弹簧测力计施加2N的力时C点处所挂钩码最多,为:
知力臂越长越省力,当在杠杆最左端用弹簧测力计施加2N的力时C点处所挂钩码最多,为:
![]()
即挂钩码的最多个数为6个。

练习册系列答案
相关题目