题目内容
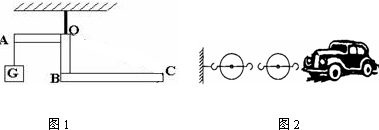 (1)如图1,杠杆AOBC可绕O点自由转动,在A处挂上一重物G,欲在C处施加一最小动力,使其能在图示位置平衡.请做出此动力的方向.
(1)如图1,杠杆AOBC可绕O点自由转动,在A处挂上一重物G,欲在C处施加一最小动力,使其能在图示位置平衡.请做出此动力的方向.(2)用滑轮组拉出陷人泥中的汽车.在图2中画出最省力的绳子绕法.
分析:(1)根据杠杆平衡的条件,F1×L1=F2×L2,在杠杆中的阻力、阻力臂一定的情况下,要使所用的动力最小,必须使动力臂最长.而在通常情况下,连接杠杆中支点和动力作用点这两点所得到的线段最长.
(2)要解决此题,需要知道滑轮组的绕线方法.可以从定滑轮或动滑轮绕起.要知道从动滑轮绕起比从定滑轮绕起多中间一根绕线承担物重,更省力.
(2)要解决此题,需要知道滑轮组的绕线方法.可以从定滑轮或动滑轮绕起.要知道从动滑轮绕起比从定滑轮绕起多中间一根绕线承担物重,更省力.
解答:解:(1)连接OC就是最长的动力臂,根据杠杆平衡的条件,要使杠杆平衡,动力方向向下垂直于OC的线段即为最小的动力.如下图所示:
(2)只有一个动滑轮,要求最省力,绳子先系在动滑轮的固定挂钩上,然后绕过左边的定滑轮,再绕过动滑轮.
故答案为:

(2)只有一个动滑轮,要求最省力,绳子先系在动滑轮的固定挂钩上,然后绕过左边的定滑轮,再绕过动滑轮.
故答案为:
点评:要做出杠杆中的最小动力,可以按照以下几个步骤进行:
1、确定杠杆中的支点和动力作用点的位置;
2、连接支点与动力作用点,得到最长的线段;
3、经过动力作用点做出与该线段垂直的直线;
4、根据杠杆平衡原理,确定出使杠杆平衡的动力方向.
1、确定杠杆中的支点和动力作用点的位置;
2、连接支点与动力作用点,得到最长的线段;
3、经过动力作用点做出与该线段垂直的直线;
4、根据杠杆平衡原理,确定出使杠杆平衡的动力方向.

练习册系列答案
相关题目