题目内容
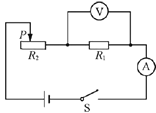
【题目】如图所示,是我们常见的图象,这种图象如果在横纵坐标加上适当的物理量及单位,不可以用来描述( )

A. 同种物质质量与体积的关系
B. 单位时间内通过一个导体的电流产生的热量与通过该导体电流的关系
C. 同一位置物体所受重力与质量的关系
D. 匀速直线运动的物体通过的路程与时间的关系
【答案】B
【解析】
由图象可知,横坐标表示的物理量和纵坐标表示的物理量是成正比的关系;
A.同种物质密度一定,质量与体积成正比。可以用该图象描述;不符合题意
B.单位时间内通过一个导体的电流产生的热量与通过该导体电流的关系是二次函数关系,不能用该图象描述;符合题意;
C.物体的重力和质量成正比,可以用该图象描述;不符合题意;
D.匀速直线运动的物体,速度是一定值,路程和时间成正比,可以用该图象描述。不符合题意;

 夺冠训练单元期末冲刺100分系列答案
夺冠训练单元期末冲刺100分系列答案 新思维小冠军100分作业本系列答案
新思维小冠军100分作业本系列答案 名师指导一卷通系列答案
名师指导一卷通系列答案


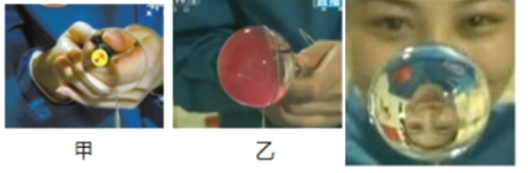
【题目】小张同学在做“测量小灯泡电阻”的实验中,所用器材如下:两节新干电池,标有2.5 V相同规格灯泡若干,两个滑动变阻器R1“10 Ω 1 A”、R2“20 Ω 2 A”,开关、导线若干。

(1)请你根据图甲,用笔划线代替导线,将图乙中的电路图连接完整(要求:滑动变阻器滑片P向右移动时灯泡变亮,电压表选择合适的量程,且导线不交叉)。
(_______)
(2)闭合开关前,应将滑片P置于__________(选填“A”或“B”)端。正确连接电路后,闭合开关S,移动滑片P,小张发现小灯泡始终不亮,电流表示数几乎为0,电压表示数接近电源电压,则故障原因可能是__________。
(3)排除故障后,移动滑片P,依次测得6组数据,如表一所示。其中第2次实验时电流表表盘如图丙所示,此时电路中的电流为__________A;第4次实验时灯泡电阻值为__________Ω。由表一中数据可知,小张选用的滑动变阻器应是__________(选填“R1”或“R2”)。
表格一
实验次数 | 1 | 2 | 3 | 4 | 5 | 6 |
电压U/V | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 | 2.8 |
电流I/A | 0.16 | 0.22 | 0.25 | 0.28 | 0.29 | |
电阻R/Ω | 3.1 | 6.8 | 8.9 | 9.7 |
表格二
实验次数 | 1 | 2 | 3 |
电阻R/Ω | 5 | 10 | 20 |
电流I/A | 0.30 | 0.20 | 0.12 |
(4)小张将这6组数据算得的电阻值取平均值作为小灯泡的电阻,这种数据处理方式是__________(选填“合理”或“不合理”)的。
(5)小张继续用图乙所示装置来探究“电流与电阻的关系”。他分别把阻值准确的5 Ω、10 Ω、20 Ω的定值电阻接入原小灯泡的位置,通过实验,记录电流表示数如表二所示。他发现通过导体的电流跟电阻不成反比,其中原因可能是:_______________________。


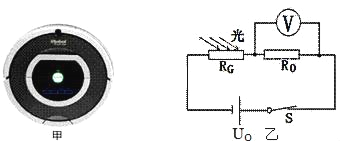
【题目】如图甲所示为一款能自动清扫地面的扫地机器人。机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物。当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电。表一为某扫地机器人的部分参数。电池容量指放电电流与放电总时间的乘积。
额定工作电压 | 12V | 额定功率 | 30W |
电池容量 | 2500mAh | 工作噪音 | <50dB |
净重 | 4kg | 最大集尘量 | 1kg |
表一:
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二。真空度指主机内部气压与外界的气压差。风量指单位时间内通过吸尘电机排出的空气体积。吸尘电机吸入功率与输入功率的比值叫做效率。
表二:
真空度(Pa) | 400 | 450 | 500 | 550 | 600 |
风量(m3/s) | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
吸入功率(W) | 10 | 9 | 8.5 | 7.8 |
(1)机器人工作时,主机内部的气压_____(选填“大于”、“小于”或“等于”)大气压而产生吸力。若该机器人向障碍物垂直发射超声波,经过0.001s收到回波,则其发射超声波时与障碍物间的距离为_____ cm.(设超声波在空气中的传播速度为340m/s)
(2)该机器人正常工作时的电流为_____A;充满电后至下一次自动充电前能够连续正常工作的最长时间为_____min。
(3)由表二数据可知,当风量为0.015m3/span>/s时,若吸尘电机的输入功率为25W,此时其效率为_____%;上述风量下,10min内通过吸尘电机排出的空气质量为_____kg.(取ρ空气=1.3kg/m3)
(4)光敏电阻是制作灰尘传感器的常用元件。图乙为某机器人中吸尘电机内部的光敏电阻的控制电路,两端总电压U0恒定(U0<12V),RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻。当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为4.5V和2.25V,则R0=_____Ω。
(5)若机器人1秒钟消耗的电能中有40%用于克服摩擦力做功。已知集尘盒空置时,机器人匀速运动时受到的摩擦阻力为16N,查阅资料显示摩擦力与压力成正比,则达到最大集尘量时机器人运动的速度为多少?(写出必要计算步骤)(____)