题目内容
【题目】实验目的:探究杠杆平衡条件杠杆的平衡状态:______或______;
实验器材:铁架台、带刻度的杠杆、钩码和细线、______;
实验步骤:
(1)将杠杆的中点固定在铁架台上。调节杠杆两端的______,使其在______位置平衡;
(2)在支点两侧挂钩码,改变钩码的______或______,使杠杆再次在______位置平衡;
(3)记录力与力臂的数据在下表中(每个钩码重力约为0.5牛,杠杆上每一格5厘米);
实验数据 | 动力(牛) | 动力臂(厘米) | 阻力(牛) | 阻力臂(厘米) | ||
1 | ||||||
2 | ||||||
3 |
将实验数据进行处理,填在表中空格处;
(4)如图乙,将钩码挂在支点一侧,用______在同一侧竖直向______拉,使杠杆在______位置平衡;
(5)记录力与力臂的数据在下表中;
实验数据 | 动力(牛) | 动力臂(厘米) | 阻力(牛) | 阻力臂(厘米) | ||
1 | ||||||
2 | ||||||
3 |
将实验数据进行处理,填在表中空格处;
(6)实验结论:当杠杆______时,______;
思考
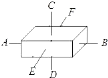
(7)杠杆在如图甲所示位置静止,此时杠杆________(选填“处于”或“不处于”)平衡状态。需向_______调节平衡螺母,使其在水平位置平衡。
(8)实验时要让杠杆在水平位置平衡的目的是______;
(9)本实验多次实验的目的是________________________________。
(10)如图丙所示,斜拉时,弹簧测力计的示数变________。

【答案】静止 绕支点匀速转动 弹簧测力计 平衡螺母 水平 数量 位置 水平 弹簧测力计 上 水平 动力乘以动力臂等于阻力乘以阻力臂 杠杆处于平衡状态 处于 右 便于从杠杆上直接读出力臂 寻找普遍规律 大
【解析】
[1][2]杠杆处于平衡状态时要么静止要么绕着支点匀速转动。
[3]根据本实验的步骤可知,本实验还要用弹簧测力计拉着杠杆并测杠杆所受的拉力。
(1)[4][5]实验前,为消除杠杆自身的重力对实验的影响,应该调节杠杆两端的平衡螺母让杠杆在水平位置平衡。
(2)[6][7][8]实验时,为了从杠杆上直接读出力臂,要调节左右两侧的钩码数量和钩码的位置使杠杆重新在水平位置平衡。
(4)[9][10][11]根据乙图可知,当杠杆一侧挂上钩码是,在同一测用弹簧测力计竖直向上拉动杠杆,为了从杠杆上直接读出力臂,应该让杠杆在水平位置平衡。
(6)[12][13]从表格中可以看出当满足动力乘以动力臂等于阻力乘以阻力臂时杠杆处于平衡状态。
(7)[14]因为杠杆静止,所以杠杆处于平衡状态。
[15]根据甲图可知,杠杆向左偏,所以应该向右调节平衡螺母使杠杆在水平位置平衡。
(8)[16]实验时要让杠杆在水平位置平衡的目的是便于从杠杆上直接读出力臂。
(9)[17]本实验多次实验的目的是寻找普遍规律。
(10)[18]当拉着杠杆时,拉力的力臂变小,而阻力等于钩码的重力不变,阻力的力臂也不变,所以弹簧测力计的示数会变大。