��Ŀ����
����Ŀ��С�������о��ܸ�ƽ����������ʵ�������õ�ʵ�������У��̶Ⱦ��ȵĸܸˣ�֧�ܣ����ɲ����ƣ��̶ȳߣ�ϸ�ߺ�������ͬ��0.5N�صĹ������ɸ���

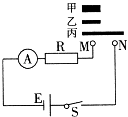
��1����ͼA��ʾ��ʵ��ǰ���ܸ�����³�����Ӧ����˵�ƽ����ĸ��_______��ѡ���������������������ڣ�ֱ���ܸ���_______λ��ƽ�⣬Ŀ���DZ��ڲ���________��֧���ڸܸ˵��е���Ϊ�������ܸ�________��ƽ���Ӱ�졣
��2��С��ͬѧ����ʵ��С�����ij�β�����ʵ������ͼB��ʾ�����Ǽ�¼������Ϊ����F1=1.5N��������L1=0.1m������F2=1N����������L2=________m��
��3����ͬѧ�����һ�����ݺ�͵ó�����������������=���������������Ľ��ۣ���ͬѧ��Ϊ����������������������__________________________________________________��
��4����ͬѧͨ�������ݷ�����ó��Ľ����ǣ�������֧�㵽�������õ�ľ���=������֧�㵽�������õ�ľ��룬��С��ͬѧ��������ͬѧΪ��֤����ͬѧ�Ľ����Ǵ���ģ���������ͼC��ʵ�飬��ʵ��_____��ѡ��������������������˵���ý����Ǵ���ģ�ͼCʵ���У���֪�ܸ���ÿ��С��Ϊ5cm��ÿ��������0.5N�������ɲ�������A��б����������ˮƽ�����30���ǣ��ܸˣ�ʹ�ܸ���ˮƽλ��ƽ��ʱ��������������____��ѡ����������������������������������������
���𰸡� �� ˮƽ ���� ���� 0.15 һ��ʵ������̫�٣�����żȻ�ԣ������ҳ��ձ���� �� ����
��������
��1�����ڸܸ���ˮƽλ��ƽ��ʱ��ƽ����ĸ�����̵�һ���ƶ������ڸܸ��Ҷ�ƫ�ߣ���˵�ƽ����ĸӦ�����̵��Ҷ��ƶ���ʹ�ܸ���ˮƽλ��ƽ�⣬�����ܸ����ضԸܸ�ƽ���Ӱ�죬�����ڸܸ��ϣ����ڲ������۴�С��
��2���ܸ�ƽ�������ǣ�F1 L1 =F2 L2��������֪���ݴ���ܸ�ƽ�������ã�1.5N��0.1m=1N��L2 �����������L2����L2 =0.15m��
��3����ͬѧֻ��һ��ʵ��͵ó��ܸ�ƽ��������ǣ�������������=�����������ۣ��Dz���������Ϊһ��ʵ������̫�٣�����żȻ�ԣ������ҳ��ձ����
��4����ͬѧͨ�������ݷ�����ó��Ľ����ǣ�������֧�㵽�������õ�ľ���=������֧�㵽�������õ�ľ��룬��С��ͬѧ��������ͬѧΪ��֤����ͬѧ�Ľ����Ǵ���ģ���������ͼC��ʵ���ܵõ���������֧�㵽�������õ�ľ���=������֧�㵽�������õ�ľ��롱����������Dz���ȷ�ģ��������۲�����֧�㵽�������õ�ľ���ʱ����ʵ������Ƿ�������ܸ�ƽ������Ϊ��F1 L1 =F2 L2 ���ɸܸ�ƽ������֪����4��0.5N��3��5cm=3N��1/2��4��5cm��������ȣ��ܸ���ˮƽλ��ƽ��ʱ���������������� ������������������

 ���ѵ����Ԫ��ĩ���100��ϵ�д�
���ѵ����Ԫ��ĩ���100��ϵ�д� ��˼άС�ھ�100����ҵ��ϵ�д�
��˼άС�ھ�100����ҵ��ϵ�д� ��ʦָ��һ��ͨϵ�д�
��ʦָ��һ��ͨϵ�д�