题目内容
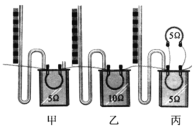
【题目】如图所示,在探究电磁感应现象的实验中,下列说法中正确的是( )
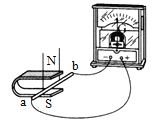
A. 保持导体棒静止,灵敏电流计指针会偏转
B. 让导体棒在磁场中运动,灵敏电流计指针一定会偏转
C. 让导体棒在磁场中左右运动,灵敏电流计指针一定会偏转
D. 将导线与灵敏电流计“+”接线柱断开,让导体棒在磁场中运动,灵敏电流计指针会偏转
【答案】C
【解析】
A.保持导体棒静止,导体在磁场中没有做切割磁感线运动,不会产生感应电流,灵敏电流计指针不会偏转,故A错误;
B.如果导体在磁场中上下运动,此时导体在磁场中没有做切割磁感线运动,不会产生感应电流,灵敏电流计指针不会偏转,故B错误;
C.让导体棒在磁场中左右运动,导体在磁场中做切割磁感线运动,会产生感应电流,灵敏电流计指针会偏转,故C正确;
D.将导线与灵敏电流计“+”接线柱断开,此时电路是断开的,不会产生感应电流,灵敏电流计指针不会偏转,故D错误。



【题目】小明在“测量滑轮组的机械效率”的实验中,利用如图所示的滑轮组进行了4次测量,测得数据如下表所示:
次数 | 钩码所受的重力G/N | 钩码提升的高度h/m | 拉力 F/N | 绳端移动的距离s/m | 机械效率 η |
1 | 1.0 | 0.1 | 0.8 | 0.4 | 31.25% |
2 | 1.0 | 0.2 | 0.8 | 0.8 | 31.25% |
3 | 2.0 | 0.1 | 1.2 | 0.4 | 41.67% |
4 | 2.0 | 0.1 | 1.5 |
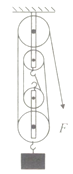
(1)根据表中的数据计算得出第4次实验时绳端移动的距离s=_______m,机械效率η=________。
(2)通过比较1、3和4三次实验数据得出:同一滑轮组,物重越大,滑轮组的机械效率_______。
(3)在忽略摩擦力和绳重的前提下,通过第1次数据可算出动滑轮的重力为_______N.
(4)以下选项中不影响滑轮组机械效率的因素是(_________)
A.动滑轮的重力 B.绳子与滑轮之间的摩擦 C.物体上升的高度
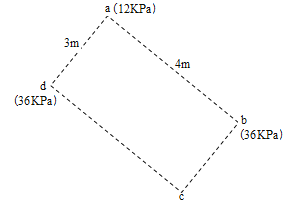
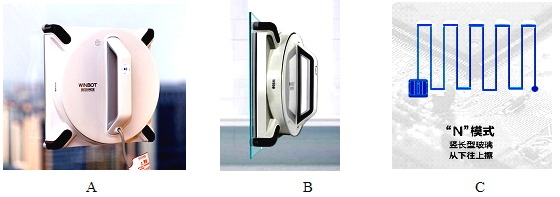
【题目】如图A是某品牌擦窗机器人(窗宝),它具有智慧运营系统。它拥有四组防跌落识别器,能够有效识别边框,可配合智能芯片巧妙避障,无框玻璃也可放心使用。擦除模式一般采用“N模式”,如图C所示为“N模式”的移动轨迹;图D为擦窗机器人部分参数
擦窗机器人部分参数 |
| |
额定电压(V) | 24 | |
额定总功率(W) (真空电动机和驱动电动机) | 60 | |
产品净重(kg) | 2 | |
产品尺寸(mm) | 250*250*115 | |
抹布与玻璃接触面积(mm2) | 30000 | |
真空度 | 3000Pa | |
D | E | |
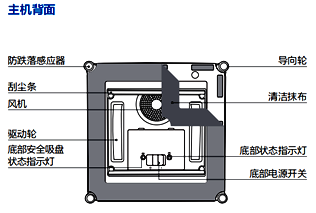
(1)擦窗机器人采用吸盘真空泵,位于如图E处的“风机”处,形成一处较小的密闭空间,该处使擦窗机器人内外受到_________差,从而牢牢的吸在玻璃窗上。该处的真空度可达3000Pa(即内部气压为3000Pa),若机器人内吸盘的面积为30cm2,求密闭空间内气体对机器人的压力大小为多少______?
(2)图B中为擦窗机器人静止在窗户上,请作出此时它受到的摩擦力示意图。
(__________)
(3)正常工作中,电动机的工作效率为80%,则电动机工作10min会产生多少热量_______?
(4)擦窗机器人在擦窗过程中受驱动电动机驱动,若擦窗机器人在擦窗过程中受到的滑动摩擦力恒为100N,现有一扇窗户,其玻璃面高1.5m,宽1m,将机器人置于该玻璃上方一角,采用“N”型模式擦窗,擦除过程中水平方向和竖直方向均做匀速直线运动,且为了达到更好的净洁效果,每次单向擦窗时会覆盖原擦除面的50%。求擦窗机器人在移动擦完该窗过程中克服摩擦力做的功__________。