��Ŀ����
����Ŀ�����˼�ʻ�ɻ���ơ����˻��������˻��ķ��п���ϵͳ��ơ��ɿء������˻���ͣ���Ƿ��С����ĸ�������С����������½��ȷ���ָ��ɷɿ��´�ɿ���Ҫ�ɸ�֪������̬�������ǡ�GPS��λģ�顢����������������ѹ�������ȸ��ֹ��ܵĴ����������Ƶ�·��ɣ�
��1��GPS��λģ������������Ϣ����������еĴ����ٶ�Ϊm/s��
��2����������������̽�����˻��ڷ���ʱ�������ϰ��������Ϊ�������������ص㣮
��3����ѹ��������ͨ���ⶨ����ѹֵ��֪���˻�����λ�õ� ��
��4��ij���˻��������ѹ14.8V������ l0000mAh�ĵ���ṩ�����������õ�������ṩkWh�ĵ��ܣ�����Щ���ܵ�80%���ڷ��У������й���Ϊ200W ʱ�������ʱ��Ϊh��
���𰸡�
��1����Ų���3��108
��2�������Ժá�����ǿ
��3���߶�
��4��0.148��0.592
���������⣻��1��GPS��λģ�����õ�Ų���������Ϣ����������еĴ����ٶ�Ϊ3��108m/s����2�����������з����Ժá�����ǿ�������ó�������������̽�����˻��ڷ���ʱ�������ϰ����3������ѹ�Ĵ�С��߶��йأ��߶�Խ�ߣ���ѹԽС�����ݴ���ѹ����ֵ���Բⶨ���˻��ĸ߶ȣ���4�����˻��ṩ�ĵ���Ϊ��W=UIt=14.8V��l0000mAh=14.8V��l0A��3600s=532800J=0.148kWh�� �����ʱ��Ϊ��P= ![]() =
= ![]() =0.592h��
=0.592h��
���Դ��ǣ���1����Ų���3��108����2�������Ժá�����ǿ����3���߶ȣ���4��0.148��0.592��
�����㾫�������ڱ��⿼��ĵ�Ų��Ĵ����͵繦�ļ��㣬��Ҫ�˽��Ų��Ĵ����ٶȺ�������еĴ����ٶ���ͬ���繦���㹫ʽ��W=UIt��ʽ�е�λW����(J)��U����(V)��I����(A)��t���룩���ܵó���ȷ�𰸣�

 �㽭֮�ǿ�ʱ�Ż���ҵϵ�д�
�㽭֮�ǿ�ʱ�Ż���ҵϵ�д� ����˼ά�żӿ���ϵ�д�
����˼ά�żӿ���ϵ�д�

����Ŀ��������̽��
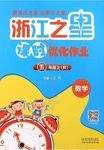
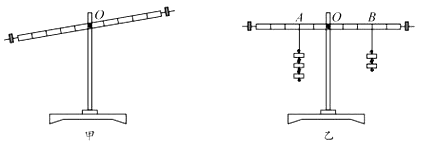
��ѧ�Ұ���֣�����ƽ�е���ͨ�������ͼ1��ʾ������ͼ��ʵ�ߡ����߷ֱ��ʾͨ��ǰ������������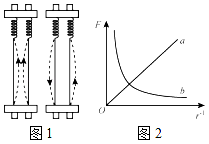
��1���ɼ���ƽ��ͨ�絼��֮�����������ã����ң���ͨ��ĵ��������෴ʱ���������
��2�������ƽ��ͨ�絼��֮���������F�Ĵ�С�����������еĵ�����I1��I2 �� ���ߵij���l������֮��ľ���r�йأ��й�ʵ���������£�
ʵ����� | l/m | I1/A | I2/A | r/m | F/N |
1 | 1 | 0.2 | 0.2 | 0.1 | 1.0��10��7 |
2 | 1 | 0.5 | 0.2 | 0.1 | 2.5��10��7 |
3 | 1.5 | 0.2 | 0.2 | 0.1 | 1.5��10��7 |
4 | 1.5 | 0.2 | 0.2 | 0.3 | 0.5��10��7 |
5 | 1.5 | 0.4 | 0.1 | 0.2 |
���뽫������д����
����ƽ�е�����������F�ı���ʽΪF=k������kΪ��������k=������ֵ�͵�λ����
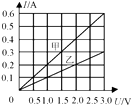
�۶��ڳ���һ��������ƽ�е��ߣ��������ͨ�������I1��I2��С���䣬�������ܵ�����F�뵼�����r֮��Ĺ�ϵ������ͼ2��ʾͼ���е�ͼ������ʾ��
��������ߵij���Ϊ0.8m������֮��ľ���Ϊ0.4m��һ�����ߵ���Ϊ0.5A���������ܵ�����Ϊ5��10��7N������һ�����ߵ���ΪA��