题目内容
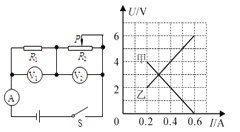
【题目】如图左所示电路,电源电压保持不变,当闭合开关S,调节滑动变阻器阻值从最大变化到最小,两个电阻的“U﹣I”关系图像如图右所示。则下列判断正确的是( )
A.电源电压为10V
B.定值电阻R1的阻值为20Ω
C.滑动变阻器R2的阻值变化范围为0~10Ω
D.变阻器滑片在中点时,电流表示数为0.3A
【答案】D
【解析】
试题分析:从“U-I”关系图象可以看出,甲为滑动变阻器的关系图象,因为最后电压变为0,此时滑动变阻器的电阻为0,乙为电阻R1的图象.(1)当滑动变阻器的阻值最大时,电路中的电流最小,根据图象读出电表的示数,利用串联电路的电压特点求出电源的电压,利用欧姆定律求出电阻R1的电阻和滑动变阻器的最大阻值;(2)根据电阻的串联和欧姆定律求出变阻器滑片在中点时,电路中的电流.解:从“U-I”关系图象可以看出,甲为滑动变阻器的关系图象,因为最后电压变为0,此时滑动变阻器的电阻为0,乙为电阻R1的图象;(1)当滑动变阻器的阻值最大时,两电阻串联,电路中的电流最小,由图乙可知,此时电路中的电流I=0.2A,电阻R1的电压U1=2V,滑动变阻器两端的电压U2=4V,因串联电路总电压等于各支路电压之和,所以,电源电压为U=U1+U2=2V+4V=6V,故A错误;由![]() 可得,定值电阻R1的阻值:
可得,定值电阻R1的阻值:![]() ,故B错误;滑动变阻器的阻值最大为:
,故B错误;滑动变阻器的阻值最大为:![]() ,即滑动变阻器R2的阻值变化范围为0~20Ω,故C错误;(2)因串联电路中总电阻等于各分电阻之和,所以,变阻器滑片在中点时,电流表示数:
,即滑动变阻器R2的阻值变化范围为0~20Ω,故C错误;(2)因串联电路中总电阻等于各分电阻之和,所以,变阻器滑片在中点时,电流表示数:
 ,故D正确.故选D.
,故D正确.故选D.

 名校课堂系列答案
名校课堂系列答案
【题目】送餐机器人是智能商务电器的一种.正逐渐进入我们的生活,如图所示,是某餐厅出现的一款送餐机器人.该机器人送餐服务时在1min内沿直线匀速移动的距离为18m,若它在移动中所受阻力为200N,其他部分参数如表,请你完成下列问题:
身高 | 160cm |
体重 | 50Kg |
续航时间 | 12h |
托盘承受重力 | 5Kg |
与地面接触总面积 | 10﹣2m2 |

(1)求出其未服务静止时,它对水平地面的压强是多少?
(2)此机器人在送餐服务时运动的速度为多大?
(3)此机器人1min送餐服务过程中克服阻力所做的功及功率分别是多大?