题目内容
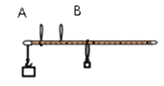
【题目】如图,用定滑轮和动滑轮将质量相同的甲、乙两物体匀速提升相同的高度不计绳重与摩擦,且动滑轮重G动小于乙物体的物重G,则有用功W甲_____W乙,所用的拉力F甲____F乙.(选填“>”、“<”或“=”,下同),其机械效率![]() 甲____
甲____![]() 乙.
乙.
【答案】= > >
【解析】
[1]有用功指的是为达到目的而做的功,本题中指的是克服物体重力做的功;
[2]动滑轮和定滑轮的使用特点:使用定滑轮不能省力,但能改变动力的方向;使用动滑轮不能改变动力的方向,但能省力。
[3]机械效率等于有用功和总功的比值,根据机械效率公式![]() 分析两个滑轮机械效率的大小。
分析两个滑轮机械效率的大小。
[1]用定滑轮和动滑轮将质量相同的甲、乙两物体匀速提升相同的高度,不计绳重与摩擦,因此所做的有用功一样大,即W甲=W乙;
[2]由定滑轮的使用特点可知:F甲=G,而乙图中的滑轮是动滑轮,所![]() ,因动滑轮重量小于乙物体的物重G,故F甲>F乙;
,因动滑轮重量小于乙物体的物重G,故F甲>F乙;
[3]由于要克服动滑轮重力的作用,所以使用动滑轮做的总功多,由![]() 可知定滑轮的机械效率高,所以η甲>η乙。
可知定滑轮的机械效率高,所以η甲>η乙。

 浙江名校名师金卷系列答案
浙江名校名师金卷系列答案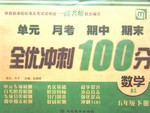 全优冲刺100分系列答案
全优冲刺100分系列答案
【题目】如图是“探究串联电路电流特点”的实验电路图:
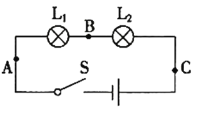
(1)实验中,选择两个小灯泡的规格应该的________(填“相同”或“不相同”)。
(2)连接电路时开关应该__________;
(3)下表是某同学实验中的一组数据:
电流表的位置 | A | B | C |
电流I/A | 0.3 | 0.3 | 1.5 |
电流I/A | 0.2 | 0.2 | 0.2 |
电流I/A | 0.4 | 0.4 | 0.4 |
指出上述表格所记录的数据中,明显错误的数值是______,造成错误的原因是________。
(4)实验中某同学发现两个串联的小灯泡中,一个发光,一个不发光,造成其中一个小灯泡不发光的原因是(______)
A.通过灯泡的电流小 B.灯泡的灯丝断了
C.灯丝的电阻小 D.小灯泡靠近负极
(5)从他们的实验数据可以看出串联电路电流规律是___;
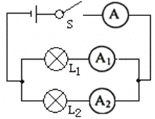
(6)该同学进一步设计了如图实验来验证“并联电路电流规律”,如图所示并得到如下实验数据,于是他得出结论“并联电路中干路电流等于各支路电流之和且各支路电流都相等”,你认为他的结论是否合理?____;理由是_______;
测次 电流 | 1 |
I1/A | 0.16 |
I2/A | 0.16 |
I/A | 0.32 |
【题目】在研究杠杆平衡条件的探究活动中:

(1)实验前,发现杠杆左端偏高,则可将右端的平衡螺母向______调节;
(2)实验中,应调节杠杆在水平位置平衡,这样做是为了______.
(3)下表是某同学实验的过程记录,请把表格中空缺部分补充完整.
次数 | 动力/N | 动力臂/m | 阻力/N | 阻力臂/m |
1 | 1.96 | 0.04 | 3.92 | 0.02 |
2 | 0.49 | 0.06 | 0.98 | 0.03 |
3 | 2.45 | 0.03 | 1.47 | _________ |
(4)若某次操作出现如右上图所示情况,发现F1×OB与F2×OA两者并不相等,这是由于______。
(5)某次实验中,用如图乙所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式。这主要是以下哪种原因________(选填字母)。
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
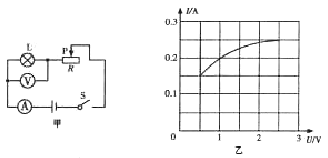
(6)如图丙所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一个“拉力——位移传感器”竖直作用在杆上,并能使杆始终保持水平平衡。该传感器显示其拉力F与作用点到O点距离x的变化关系如图丁所示。由图可知金属杆重__________N。