题目内容
如图所示,是探究杆杠平衡条件的实验装置.
(1)两端螺母的作用是什么?______;
(2)若杠杆在使用前发现左端低、右端高,要使它在水平位置平衡,应将杠杆的平衡螺母向______调节;此后,在整个实验过程中,是否还需再旋动两侧的平衡螺母?______.
(2)他得到的两组数据如下表所示
这两组数据中,第______次实验的数据肯定有错误.经检查,发现是测量动力臂时读数读错了;测量值是______(选填“偏大”或“偏小”).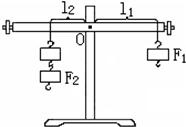
(1)两端螺母的作用是什么?______;
(2)若杠杆在使用前发现左端低、右端高,要使它在水平位置平衡,应将杠杆的平衡螺母向______调节;此后,在整个实验过程中,是否还需再旋动两侧的平衡螺母?______.
(2)他得到的两组数据如下表所示
| 实验序号 | 动力F1(N) | 动力臂L1(m) | 阻力F2(N) | 阻力臂L2(m) |
| 1 | 2 | 0.2 | 1 | 0.1 |
| 2 | 1 | 0.08 | 2 | 0.04 |
(1)通过调节螺母,使杠杆处于水平平衡.
故答案为:调节杠杆在水平位置平衡.
(2)左端低、右端高,重心应右调,平衡螺母应右调.
故答案为:右;不需要.
(3)实验序号1中力与力臂的乘积不相等,若动力臂错了,则有:F1L1=F2L2,即2N×L1=1N×0.1m,得L1=0.05m.
故答案为:1,偏大.
故答案为:调节杠杆在水平位置平衡.
(2)左端低、右端高,重心应右调,平衡螺母应右调.
故答案为:右;不需要.
(3)实验序号1中力与力臂的乘积不相等,若动力臂错了,则有:F1L1=F2L2,即2N×L1=1N×0.1m,得L1=0.05m.
故答案为:1,偏大.

练习册系列答案
 名校课堂系列答案
名校课堂系列答案
相关题目
 26、如图所示,是探究杆杠平衡条件的实验装置.
26、如图所示,是探究杆杠平衡条件的实验装置.
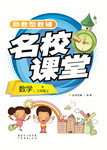
如图所示,是探究杆杠平衡条件的实验装置.
(1)两端螺母的作用是什么?______;
(2)若杠杆在使用前发现左端低、右端高,要使它在水平位置平衡,应将杠杆的平衡螺母向______调节;此后,在整个实验过程中,是否还需再旋动两侧的平衡螺母?______.
(2)他得到的两组数据如下表所示
这两组数据中,第______次实验的数据肯定有错误.经检查,发现是测量动力臂时读数读错了;测量值是______(选填“偏大”或“偏小”).

(1)两端螺母的作用是什么?______;
(2)若杠杆在使用前发现左端低、右端高,要使它在水平位置平衡,应将杠杆的平衡螺母向______调节;此后,在整个实验过程中,是否还需再旋动两侧的平衡螺母?______.
(2)他得到的两组数据如下表所示
| 实验序号 | 动力F1(N) | 动力臂L1(m) | 阻力F2(N) | 阻力臂L2(m) |
| 1 | 2 | 0.2 | 1 | 0.1 |
| 2 | 1 | 0.08 | 2 | 0.04 |
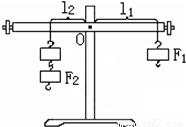
如图所示,是探究杆杠平衡条件的实验装置.
(1)两端螺母的作用是什么?______;
(2)若杠杆在使用前发现左端低、右端高,要使它在水平位置平衡,应将杠杆的平衡螺母向______调节;此后,在整个实验过程中,是否还需再旋动两侧的平衡螺母?______.
(2)他得到的两组数据如下表所示
这两组数据中,第______次实验的数据肯定有错误.经检查,发现是测量动力臂时读数读错了;测量值是______(选填“偏大”或“偏小”).
(1)两端螺母的作用是什么?______;
(2)若杠杆在使用前发现左端低、右端高,要使它在水平位置平衡,应将杠杆的平衡螺母向______调节;此后,在整个实验过程中,是否还需再旋动两侧的平衡螺母?______.
(2)他得到的两组数据如下表所示
| 实验序号 | 动力F1(N) | 动力臂L1(m) | 阻力F2(N) | 阻力臂L2(m) |
| 1 | 2 | 0.2 | 1 | 0.1 |
| 2 | 1 | 0.08 | 2 | 0.04 |
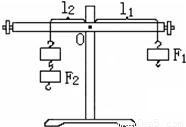
如图所示,是探究杆杠平衡条件的实验装置.
(1)两端螺母的作用是什么?______;
(2)若杠杆在使用前发现左端低、右端高,要使它在水平位置平衡,应将杠杆的平衡螺母向______调节;此后,在整个实验过程中,是否还需再旋动两侧的平衡螺母?______.
(2)他得到的两组数据如下表所示
这两组数据中,第______次实验的数据肯定有错误.经检查,发现是测量动力臂时读数读错了;测量值是______(选填“偏大”或“偏小”).
(1)两端螺母的作用是什么?______;
(2)若杠杆在使用前发现左端低、右端高,要使它在水平位置平衡,应将杠杆的平衡螺母向______调节;此后,在整个实验过程中,是否还需再旋动两侧的平衡螺母?______.
(2)他得到的两组数据如下表所示
| 实验序号 | 动力F1(N) | 动力臂L1(m) | 阻力F2(N) | 阻力臂L2(m) |
| 1 | 2 | 0.2 | 1 | 0.1 |
| 2 | 1 | 0.08 | 2 | 0.04 |