题目内容
【题目】“蛟龙号”潜水器的总质量为22吨,最深可下潜7000m深度.当完成任务,潜水器回到水面后,潜水器被竖直拉高6m,用时5min;又水平移动5m,用时2min,回到装载船上,从出了水面到回到装载船上的过程中,克服重力做功_____J,水平移动时拉力的功率为_____W(g=10N/kg)。
【答案】1.32×106 0
【解析】
[1]潜水器的总重力
G=mg=22×103kg×10N/kg=2.2×105N,
从出了水面到回到装载船上的过程中,克服重力做功
W=Gh=2.2×105N×6m=1.32×106J;
[2]水平移动时拉力的方向竖直向上,物体没有在力的方向上通过距离,所以拉力没有做功,由P=![]() 可知水平移动时拉力的功率为零。
可知水平移动时拉力的功率为零。

 一课一练课时达标系列答案
一课一练课时达标系列答案【题目】阅读短文,回答问题:
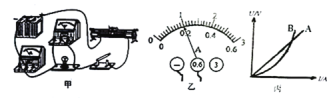
混合动力电动自行车
如图甲所示,为某款混合动力电动自行车,由车架、电动机、锂电池、调速系统、发电机组成。它有人力驱动(关闭电源、骑行者踩脚踏板)、电力驱动(不踩脚踏板、仅靠锂电池驱动)和混合动力驱动(骑行者踩脚踏板辅助锂电池驱动给车提供能量)三个骑行模式。下表为该款电动自行车的铭牌上给出的技术参数。最大载重即骑车人和所载物体的最大总质量。电池容量是指放电电流与放电时间的乘积。
型号 | X XX | 电动机额定输出功率 | 160W |
整车质量 | 40Kg | 电动机额定电压 | 40V |
最大载重 | 120Kg | 电动机额定电流 | 5.0A |
锂电池额定电压 | 40V | 单人电力驱动连续行驶里程 |
|
锂电池容量 | 10Ah | 单人混合动力驱动连续行驶里程 |
|

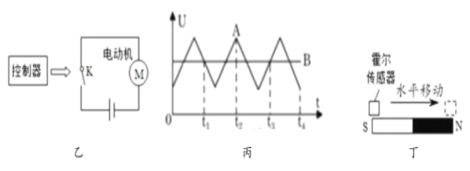
该款电动自行车的调速系统主要由磁铁、传感器、控制器和开关K四部分组成。传感器是将磁信号转变成电信号的装置,它产生的电压U0随磁场增强而增大。在转动电动自行车手柄旋转套时,旋转套中磁铁与固定在手柄中的传感器的距离发生改变,使U0发生变化。控制器的作用是将自身产生的电压U与传感器的电压U0比较后,输出控制电压Uk,控制开关K的通断,当U小于U0时,Uk=1V, 图乙中开关K闭合: U1大于U0时,Uk=0, K断开。当U0增大时,每次电动机工作与不工作时间的比值就增大,电动机的转速也随之增大,反之,则减速。图丙中折线A和直线B分别是U和U0随时间变化的关系图线。
(1)电动自行车骑行过程中发电机将________能转化为______能。
(2)下列说法,正确的是(______)
A.电池充满时,最多储存4度电
B.当Uk=0时,电动机中有电流通过
C.如图丙所示,电动车在t4时刻获得动力
D.按图丁操作,传感器产生电压不断变大
(3)此车的电动机在额定电压下正常工作时消耗的电功率是_________W,电动机正常工作时电能转化为机械能的效率________。 当自行车以额定功率在平直公路上满载匀速行驶时,若其受到的阻力为总质量的0.02倍,则此时速度_________m/s (g=10N/kg)
(4)这款车在“混合动力驱动”模式下正常行驶时,人所提供的能量与“电力驱动”时锂电池提供的能之比为___________.转动电动自行车手柄旋转套,让磁铁与传感器距离变小时,传感器产生的电压U________ ,车速________(以 上两空均选填“减少”、“不变”或“增大”)。
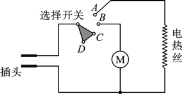
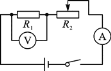
【题目】小明家新买了一个家用电吹风,他查阅使用说明书发现其简化电路如图所示,主要技术参数如下表.电吹风在额定电压下工作,请解答如下问题:
(1)当电吹风吹冷风时,通过电动机的电流是多大?
(2)电热丝工作时的电阻是多大?
(3)若电吹风内电动机的电阻是1 Ω,则电吹风吹冷风10 min产生的热量是多少?
(4)当电吹风实际工作电压为200V时,电吹风电热丝工作时的实际功率多大?(结果保留一位小数)。
热风温度 | 50~75 ℃ |
额定功率 | 热风时:990 W |
冷风时:110 W | |
额定电压 | 220 V |
质量 | 0.5 kg |
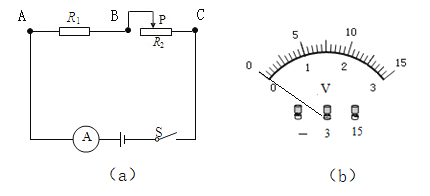

【题目】在测额定电压为2.5V的小灯泡(电阻约为10Ω)功率的实验中,老师给小明提供了以下器材:电流表(0~0.6A 0~3A)、电压表(0~3V 0~15V)、开关、电源电压为6V的电源和滑动变阻器各一个,导线若干.
(1)小明连接的电路图如图甲所示,图中有两个元件的连接明显错误,分别是__________和_______(填写元件名称).
(2)改正错误后,闭合开关,移动滑片P,使灯泡发光,测出灯泡的相关物理量, 并把部分测量数据记录在如下自己设计的实验表格中:
次数 | 电压/V | 电流/A | 实际功率/W | 功率平均值/W |
1 | 1.6 | |||
2 | 2.5 | 0.24 | ||
3 | 2.8 | 0.26 | 0.73 |
①针对他设计的实验表格,最后一栏是该实验不需要的,其理由是:_______________
②第一次实验,电流如图乙所示,电流大小为____________A。
③小灯泡的额定功率为_________W
(3)测完功率后,老师又给小明个未知定值电阻,计他测出未知电阳的阻值。他接下来的操作是断开开关,将滑动变阻器的滑片移到________把小灯泡换成未知电阻。按正确方法完成实验后,他分别绘制了“定值电阻”和“小灯泡”的I-U图像如丙图所示,则表示“定值电阻”的I-U图像的是__________ ( 填“A”或“B”),你这样判断的依据是____________
