题目内容
 在研究“杠杆的平衡条件”实验中,有一组同学的数据如表:
在研究“杠杆的平衡条件”实验中,有一组同学的数据如表:| 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 6 | 4 | 4 | 6 |
| 5 | 6 | 10 | 3 |
| 3 | 20 20 |
15 | 4 |
(2)分析实验数据,得出杠杆的平衡条件是:
F 1L1=F2L2
F 1L1=F2L2
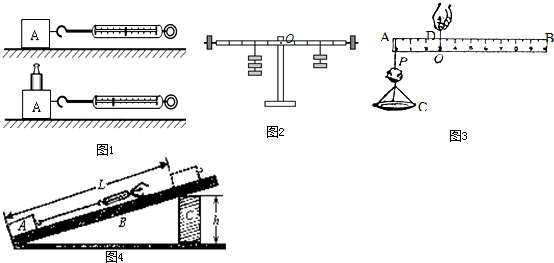
(3)解决实际问题:小云在家在做手工时,需要将木板上钉错的一枚钉子拔掉,他想到了物理课上提到的羊角锤.于是他很快解决了问题.如图2是他拔钉子的示意图,请你在确定出了支点O,阻力F2、阻力臂L2和动力臂L1后.判断羊角锤是一个
省力
省力
杠杆,它的特点是动力臂大于
大于
阻力臂;为了更省力的拔出钉子,你认为可以(说出一种合理的建议)将手向手柄末端移动
将手向手柄末端移动
,理由是:阻力和阻力臂一定时,动力臂越大,动力越小
阻力和阻力臂一定时,动力臂越大,动力越小
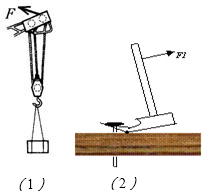
.(4)如图1是某建筑工地上正在运行的一台起重机中吊臂上的滑轮组(不计一切摩擦和绳子和动滑轮重),在拉力F的作用下把重为2.7×103N的重物匀速提起,则拉力F=
900
900
N.若动滑轮和吊钩共重300N,则拉力F=1000
1000
N.(5)电工老李师傅的工具箱里有很多螺丝刀,螺丝刀上所用到的物理知识有
①
轮轴
轮轴
;②
绝缘体
绝缘体
.分析:(1)通过分析数据可得出杠杆平衡的条件,并根据杠杆平衡的条件可填上表格所缺数据.
(2)动力臂小于阻力臂的杠杆是费力杠杆;动力臂大于阻力臂的杠杆是省力杠杆.为了省力需增加动力臂的长度.
(3)从图中可以看出有三段绳子在拉重物,故在不计一切摩擦和绳子和动滑轮重的情况下,拉力为重物的三分之一.如果考虑动滑轮和吊钩总重,拉力为动滑轮、吊钩和物重的三分之一.
(4)要解决此题,需要掌握轮轴的概念、绝缘体和摩擦力大小的影响因素.由轮和轴组成,能绕共同轴线旋转的机械,叫做轮轴.不容易导电的物体叫做绝缘体.接触面越粗糙,摩擦力越大.
(2)动力臂小于阻力臂的杠杆是费力杠杆;动力臂大于阻力臂的杠杆是省力杠杆.为了省力需增加动力臂的长度.
(3)从图中可以看出有三段绳子在拉重物,故在不计一切摩擦和绳子和动滑轮重的情况下,拉力为重物的三分之一.如果考虑动滑轮和吊钩总重,拉力为动滑轮、吊钩和物重的三分之一.
(4)要解决此题,需要掌握轮轴的概念、绝缘体和摩擦力大小的影响因素.由轮和轴组成,能绕共同轴线旋转的机械,叫做轮轴.不容易导电的物体叫做绝缘体.接触面越粗糙,摩擦力越大.
解答:解:(1)分析表中数据关系可知:6×4=4×6,5×6=10×3,所以,空格=
=20,
(2)可得杠杆平衡条件:F 1L1=F2L2;
(3)拔钉子时羊角锤是绕O点转动的,即O点是支点;如图所示:
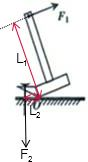
由图可知,羊角锤的动力臂大于阻力臂,所以羊角锤是省力杠杆;为了更省力,必须使动力臂增大,因此可将手向后移动,来增大动力臂的长度.
(4)不计一切摩擦和绳子和动滑轮重时,拉力F=
×G物=
×2.7×103N=900N;
考虑动滑轮和吊钩总重时,拉力F′=
×(G动+G物)=
×(300N+2.7×103N)=1000N.
(5)螺丝刀柄比头部要粗一些,所以螺丝刀相当于轮轴,比较省力.
螺丝刀柄外部包了一层橡胶,是绝缘体,防止导电.同时上面有花纹,是为了增大摩擦力.
故答案为;(1)20;(2)F 1L1=F2L2;(3)省力;大于;将手向手柄末端移动;阻力和阻力臂一定时,动力臂越大,动力越小;(4)900;1000;(5)轮轴;绝缘体.
| 15×4 |
| 3 |
(2)可得杠杆平衡条件:F 1L1=F2L2;
(3)拔钉子时羊角锤是绕O点转动的,即O点是支点;如图所示:
由图可知,羊角锤的动力臂大于阻力臂,所以羊角锤是省力杠杆;为了更省力,必须使动力臂增大,因此可将手向后移动,来增大动力臂的长度.
(4)不计一切摩擦和绳子和动滑轮重时,拉力F=
| 1 |
| 3 |
| 1 |
| 3 |
考虑动滑轮和吊钩总重时,拉力F′=
| 1 |
| 3 |
| 1 |
| 3 |
(5)螺丝刀柄比头部要粗一些,所以螺丝刀相当于轮轴,比较省力.
螺丝刀柄外部包了一层橡胶,是绝缘体,防止导电.同时上面有花纹,是为了增大摩擦力.
故答案为;(1)20;(2)F 1L1=F2L2;(3)省力;大于;将手向手柄末端移动;阻力和阻力臂一定时,动力臂越大,动力越小;(4)900;1000;(5)轮轴;绝缘体.
点评:此题知识点较多,考查了杠杆的平衡条件的运用、省力杠杆的判断和运用、滑轮组公式的运用和螺丝刀中的物理知识,是一道力学综合题.

练习册系列答案
相关题目
 (2007?越秀区一模)(1)在研究杠杆平衡条件的实验中,首先要使杠杆在水平位置平衡,其目的是使
(2007?越秀区一模)(1)在研究杠杆平衡条件的实验中,首先要使杠杆在水平位置平衡,其目的是使