题目内容
【题目】随着科技的进步,机器人正逐渐走进人们的生活,如图所示,人形机器人正在表演舞蹈,下列对其中涉及到的物理知识分析错误的是( ) 
A.机器人鞋底上凹凸不平的花纹是为了增大摩擦力
B.机器人鞋底较宽大可以减小压强
C.机器人站立时受到的支持力和它对地面的压力是一对平衡力
D.机器人跳起时,地面对它的支持力没有做功
【答案】C
【解析】解:A、机器人鞋底上凹凸不平的花纹是为了在压力一定时,通过增大接触面的粗糙程度来增大摩擦力,故A正确;
B、机器人鞋底较宽是在压力一定时,通过增大受力面积来减小压强,故B正确;
C、机器人站立时受到的支持力和它对地面的压力是作用在不同物体上的两个力,不是一对平衡力,故C错误;
D、机器人跳起时,虽然移动了距离,但不再受到地面的支持力作用,地面对它的支持力没有做功.故D正确.
故选C.
【考点精析】本题主要考查了平衡力的辨别和减小压强的方法及其应用的相关知识点,需要掌握平衡力:平衡的物体所受到的力叫做平衡力;当压力一定时,增大受力面积可以减小压强;当受力面积一定时,减小压力可以减小压强才能正确解答此题.

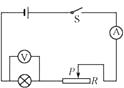
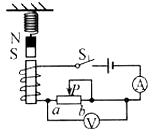
【题目】某同学用如图1所示电路“探究并联电路中电流的特点”.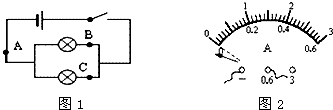
(1)在连接电路时,开关应 . 当闭合开关试触时,发现电流表的指针偏转如图2所示,原因是 .
(2)用电流表分别测出电路中的A、B、C处的电流,改变电源电压,重复实验,记录数据如下表.
实验序号 | A处的电流IA | B处的电流IB | C处的电流Ic |
第一次测量 | 0.2 | 0.2 | 0.4 |
第二次测量 | 0.3 | 0.3 | 0.6 |
第三次测量 | 0.4 | 0.4 | 0.8 |
上面表格的设计中存在的不足之处是 .
(3)该同学表格数据得出实验结论:并联电路中干路电流为支路电流的2倍.这个结论一定成立吗?
答:(选填“一定”或“不一定”).为了得出具有普遍意义的并联电路中电流的特点,应该 .