题目内容
【题目】第十七届中国国际机器人展览于2019年3月在国家会展中心举行,展会中展出了如图所示的智能机器人,关于其中涉及到的物理知识分析正确的是( )

A.机器人的“手臂”和人的手臂运动情形相同,是一个费力机械
B.机器人模仿人走路时,会受到地面给它的滑动摩擦力
C.机器人运动时消耗的电能属于一次能源
D.机器人鞋底较宽是为了减小压力
【答案】A
【解析】
A.机器人的“手臂”和人的手臂运动情形相同,手臂运动时,动力臂大于阻力臂,所以是一个费力杠杆,故A正确;
B.机器人模仿人走路时,受到的是静摩擦力,故B错误;
C.机器人运动时消耗的电能由其他能转化而来,属于二次能源,故C错误;
D.机器人鞋底较宽是为了通过增大受力面积来减小压强,故D错误。
故选A。

【题目】某小组同学准备探究“通过导体的电流与导体两端的电压的关系”,实验器材有:干电池2节、滑动变阻器(5Ω,1A)、电流表、电压表,开关各一个,不同阻值的定值电阻及导线若干:
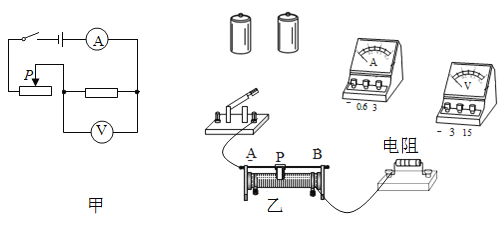
(1)图甲是电路图,请根据图甲,在图乙中连接对应的实物图;
(______)
(2)闭合开关前,应将滑动变阻器的滑片P移到______端(选填“A”或“B”端),闭合开关后,他们移动滑动变阻器的滑片至某一位置,电压表示数为0.9V,电流表示数如图甲所示,接着继续探究,把所得数据填在下表中:
实验次数 | 1 | 2 | 3 | 4 |
电压U/V | 0.9 | 1.2 | 1.5 | 1.8 |
电流I/A | 0.08 | 0.10 | 0.12 |
①甲中电流的示数为______A;
②图乙是以电流I为纵坐标、电压U为横坐标建立的平面直角坐标系,请根据他们所测数据,在坐标系中描点,画出I-U图像,并记为a,________;
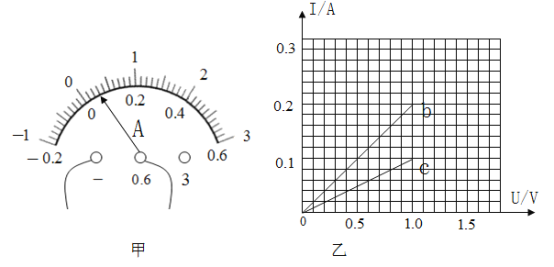
(3)图乙中b、c两条I-U图线,是其他组同学选择5Ω和10Ω的定值电阻,按图电路测量数据所画,分析a、b、c、图像,可知,对于同一段导体_______________。