15. 如图所示,电动机M的线圈电阻为r,接入电压恒为U的电源时,电动机正常工作,此时电动机通过的电流为I,消耗的电功率为P、线圈电阻的发热功率为P热、输出的机械功率为P出.则下列关系式正确的是( )
如图所示,电动机M的线圈电阻为r,接入电压恒为U的电源时,电动机正常工作,此时电动机通过的电流为I,消耗的电功率为P、线圈电阻的发热功率为P热、输出的机械功率为P出.则下列关系式正确的是( )
如图所示,电动机M的线圈电阻为r,接入电压恒为U的电源时,电动机正常工作,此时电动机通过的电流为I,消耗的电功率为P、线圈电阻的发热功率为P热、输出的机械功率为P出.则下列关系式正确的是( )| A. | I=$\frac{U}{r}$ | B. | P=IU+I2r | C. | P热=$\frac{{U}^{2}}{r}$ | D. | P出=IU-I2r |
14.下列判断正确的是( )
| A. | 带电粒子在某处所受的电场力为零,该处的电场强度不一定为零 | |
| B. | 带电粒子在某处所受的洛伦兹力为零,该处的磁感应强度一定为零 | |
| C. | 运动电荷在电场强度不为零的地方一定受到电场力的作用 | |
| D. | 运动电荷在磁感应强度不为零的地方一定受到洛伦磁力的作用 |
 将一定长度,质量不计的细绳上端固定,下端系一质点,质量为m的该质点适当的初速度就可以让它在重力和拉力的作用下在水平面内做匀速圆周运动,如图所示,这一物理模型成为“圆锥摆”.已知细线长度为l,质点质量为m.重力加速度为g,试求“圆锥摆”圆周运动周期T的取值范围.
将一定长度,质量不计的细绳上端固定,下端系一质点,质量为m的该质点适当的初速度就可以让它在重力和拉力的作用下在水平面内做匀速圆周运动,如图所示,这一物理模型成为“圆锥摆”.已知细线长度为l,质点质量为m.重力加速度为g,试求“圆锥摆”圆周运动周期T的取值范围. 质量不计的硬杆长L=30cm,两端分别固定一个可以看成质点的小球,m1=0.6kg,m2=0.3kg将杆的中点固定子在光滑的水平轴上,并用力让装置静止在水平状态,如图所示,突然撤销外力,让两小球从静止开始在竖直面内转动,近似取重力加速度g=10m/s2,求:
质量不计的硬杆长L=30cm,两端分别固定一个可以看成质点的小球,m1=0.6kg,m2=0.3kg将杆的中点固定子在光滑的水平轴上,并用力让装置静止在水平状态,如图所示,突然撤销外力,让两小球从静止开始在竖直面内转动,近似取重力加速度g=10m/s2,求:
 用轨道小车做探究“恒力做功与动能改变的关系”的实验:
用轨道小车做探究“恒力做功与动能改变的关系”的实验: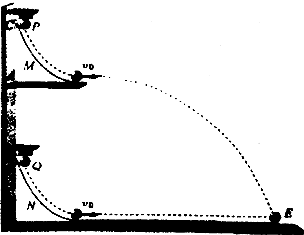 如图所示的演示装置,其实验目的是检验平抛运动的水平(“水平”or“竖直”)分运动是匀速运动,从而证明分运动具有独立(“独立”or“等时”)性.实验装置要求两个同样的,近似光滑的圆弧形轨道末端水平且在同一竖直的直线上.
如图所示的演示装置,其实验目的是检验平抛运动的水平(“水平”or“竖直”)分运动是匀速运动,从而证明分运动具有独立(“独立”or“等时”)性.实验装置要求两个同样的,近似光滑的圆弧形轨道末端水平且在同一竖直的直线上.
7.为了探测X星球,载着登陆舱的探测飞船在离星球表面较高的,半径为r1的圆轨道上运动,周期为T1总质量为m1随后登陆舱脱离飞船,先变轨到离星球表面高度可以忽略,半径为r2的圆轨道上运动,此登陆舱的质量为m2,则( )
| A. | 登陆舱在r1与r2轨道上运动时的速度大小之比为$\frac{{v}_{1}}{{v}_{2}}$=$\frac{{{r}_{2}}^{2}}{{{r}_{1}}^{2}}$ | |
| B. | 登陆舱在半径为r2轨道上做圆周运动的周期为T2=$\root{3}{{\frac{r_1^2}{r_2^2}}}{T_1}$ | |
| C. | X星球的质量为M=$\frac{{4{π^2}r_1^3}}{GT_1^2}$ | |
| D. | X星球表面的重力加速度为gx=$\frac{{4{π^2}{r_1}}}{T_1^2}$ |
6. 今年6月24日中国航天员刘旺手动控制“神州九号”飞船从后向前追上“静候”于轨道上的“天宫一号”目标飞行器,并成功实现了精准对接.在实况转播中多次展示了飞控中心大屏幕上的数据模拟图如图所示,对该图以及“神九”与“天宫”对接前后的过程,下列叙述中正确的是( )
今年6月24日中国航天员刘旺手动控制“神州九号”飞船从后向前追上“静候”于轨道上的“天宫一号”目标飞行器,并成功实现了精准对接.在实况转播中多次展示了飞控中心大屏幕上的数据模拟图如图所示,对该图以及“神九”与“天宫”对接前后的过程,下列叙述中正确的是( )
0 145499 145507 145513 145517 145523 145525 145529 145535 145537 145543 145549 145553 145555 145559 145565 145567 145573 145577 145579 145583 145585 145589 145591 145593 145594 145595 145597 145598 145599 145601 145603 145607 145609 145613 145615 145619 145625 145627 145633 145637 145639 145643 145649 145655 145657 145663 145667 145669 145675 145679 145685 145693 176998
今年6月24日中国航天员刘旺手动控制“神州九号”飞船从后向前追上“静候”于轨道上的“天宫一号”目标飞行器,并成功实现了精准对接.在实况转播中多次展示了飞控中心大屏幕上的数据模拟图如图所示,对该图以及“神九”与“天宫”对接前后的过程,下列叙述中正确的是( )| A. | 图中A是“天宫一号”目标飞行器,B是“神州九号”飞船 | |
| B. | “天宫一号”轨道站的飞行速度略小于第一宇宙速度 | |
| C. | “天宫”在近地轨道长期运行,为修正稀薄空气阻力对“天宫”的影响,需要经常进行“轨道维持”操作,操作完成后“天宫”的运行速度会略大于操作前 | |
| D. | “神九”发射后进入的是椭圆轨道,它要先完成了“抬高近地点,轨道圆化…等系列轨道修正,才能准备开始与“天宫”对接“抬高近地点”需要在“神九”运行到椭圆轨道近地点时,利用“神九”上的小火箭适当提高“神九”的速度 |