3.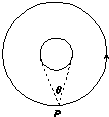 如图所示,飞行器P在赤道面绕地球做匀速圆周运动,运动方向与地球自转方向一致,已知地球相对飞行器P的张角为θ,地球的半径为R,地球的自转周期为T0,飞行器P的公转周期为T,万有引力常量为G,当地面通信基站观测到飞行器时,两者就可以进行点对点直接通信,忽略信号的传输时间.下列说法正确的是( )
如图所示,飞行器P在赤道面绕地球做匀速圆周运动,运动方向与地球自转方向一致,已知地球相对飞行器P的张角为θ,地球的半径为R,地球的自转周期为T0,飞行器P的公转周期为T,万有引力常量为G,当地面通信基站观测到飞行器时,两者就可以进行点对点直接通信,忽略信号的传输时间.下列说法正确的是( )
如图所示,飞行器P在赤道面绕地球做匀速圆周运动,运动方向与地球自转方向一致,已知地球相对飞行器P的张角为θ,地球的半径为R,地球的自转周期为T0,飞行器P的公转周期为T,万有引力常量为G,当地面通信基站观测到飞行器时,两者就可以进行点对点直接通信,忽略信号的传输时间.下列说法正确的是( )| A. | 地球相对飞行器P的张角θ越小,飞行器P的运行周期越大 | |
| B. | 飞行器P的轨道半径r=Rsin$\frac{θ}{2}$ | |
| C. | 地球的质量M=$\frac{{4{π^2}{R^3}}}{{G{T^2}{{sin}^3}\frac{θ}{2}}}$ | |
| D. | 赤道上固定的一个地面通信基站在T0的时间内可以与飞行器通信的总时间为$\frac{(π-θ)}{2π}\frac{{{T_0}^2}}{{{T_0}-T}}$ |
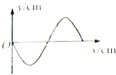
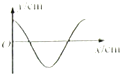
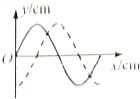 如图,一列简谐横波沿x轴正方向传播,实线和虚线分别表示t1=0和t2=0.5s(T>0.5s)时的波形,能正确反映t3=3s时波形的是图( )
如图,一列简谐横波沿x轴正方向传播,实线和虚线分别表示t1=0和t2=0.5s(T>0.5s)时的波形,能正确反映t3=3s时波形的是图( )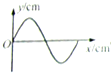

1.下列关于机械振动和机械波的说法正确的是( )
| A. | 有机械波一定有机械振动,有机械振动一定有机械波 | |
| B. | 机械波在介质中的传播速度由介质本身的性质决定,与频率无关 | |
| C. | 纵波在波传播方向上的某个质点的振动速度和波的传播速度是一样的 | |
| D. | 在机械波的形成中,介质中的质点随波一起发生迁移 |

19. N匝的矩形线圈在匀强磁场中绕垂直于磁场轴线匀速转动时产生的正弦式交变电流,其电动势的变化规律如图线a所示.当调整线圈转速后,电动势的变化规律如图线b所示.以下说法正确的是( )
N匝的矩形线圈在匀强磁场中绕垂直于磁场轴线匀速转动时产生的正弦式交变电流,其电动势的变化规律如图线a所示.当调整线圈转速后,电动势的变化规律如图线b所示.以下说法正确的是( )
N匝的矩形线圈在匀强磁场中绕垂直于磁场轴线匀速转动时产生的正弦式交变电流,其电动势的变化规律如图线a所示.当调整线圈转速后,电动势的变化规律如图线b所示.以下说法正确的是( )| A. | 图线a磁通变化率的最大值为150 V | |
| B. | 图线b电动势的瞬时值表达式是e=100sin$\frac{100}{3}$πtV | |
| C. | 线圈先后两次转速之比为2:3 | |
| D. | 在图中t=0.06s时刻线圈平面都与磁场平行 |
18. 在如图所示的电路中,理想变压器原、副线圈的匝数比为2:1,四个灯泡完全相同,其额定电压为U,若已知灯泡L3和L4恰能正常工作,那么( )
在如图所示的电路中,理想变压器原、副线圈的匝数比为2:1,四个灯泡完全相同,其额定电压为U,若已知灯泡L3和L4恰能正常工作,那么( )
在如图所示的电路中,理想变压器原、副线圈的匝数比为2:1,四个灯泡完全相同,其额定电压为U,若已知灯泡L3和L4恰能正常工作,那么( )| A. | L1和L2都不能正常工作 | B. | L1和L2都不能正常工作 | ||
| C. | 交流电源电压为2U | D. | 交流电源电压为4U |




16.关于地球同步卫星,下列说法正确的是( )
| A. | 它处于平衡状态,且具有一定的高度 | |
| B. | 它的加速度小于9.8m/s2 | |
| C. | 它的速度等于7.9km/s | |
| D. | 它的周期是24h,且轨道平面与赤道平面重合 |
15. 如图所示,两人各用6N的力沿相反方向拉一轻质弹簧的两端.当弹簧静止时,它所受的弹力和合力大小分别是( )
如图所示,两人各用6N的力沿相反方向拉一轻质弹簧的两端.当弹簧静止时,它所受的弹力和合力大小分别是( )
如图所示,两人各用6N的力沿相反方向拉一轻质弹簧的两端.当弹簧静止时,它所受的弹力和合力大小分别是( )| A. | 6N,0N | B. | 12N,12N | C. | 12N,0N | D. | 6N,6N |
14. 如图所示,将质量为m的小球用长为L的细线拴住,线的另一端固定在O点,将小球拉到与O等高的位置并使线刚好绷直,由静止开始释放小球,不计空气阻力.下列说法正确的是( )
如图所示,将质量为m的小球用长为L的细线拴住,线的另一端固定在O点,将小球拉到与O等高的位置并使线刚好绷直,由静止开始释放小球,不计空气阻力.下列说法正确的是( )
0 144073 144081 144087 144091 144097 144099 144103 144109 144111 144117 144123 144127 144129 144133 144139 144141 144147 144151 144153 144157 144159 144163 144165 144167 144168 144169 144171 144172 144173 144175 144177 144181 144183 144187 144189 144193 144199 144201 144207 144211 144213 144217 144223 144229 144231 144237 144241 144243 144249 144253 144259 144267 176998
如图所示,将质量为m的小球用长为L的细线拴住,线的另一端固定在O点,将小球拉到与O等高的位置并使线刚好绷直,由静止开始释放小球,不计空气阻力.下列说法正确的是( )| A. | 在落到最低点之前,小球的重力一直做正功,线的拉力不做功 | |
| B. | 小球在下落过程中,下落到最低点时速度达到最大 | |
| C. | 小球在下落过程中,机械能逐渐增大 | |
| D. | 小球在下落过程中机械能守恒 |