11.下列说法正确的是( )
| A. | 现代各种复杂精密的机械,都是从古代简单的机械逐步发展而来的 | |
| B. | 机器人是一种高度自动化的机器,它能代替人做一些单调重复而又要求非常精确的操作 | |
| C. | “智能机器人”是现代机器人的一个发展方向 | |
| D. | 机器人将最终代替人类 |
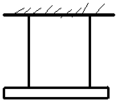
10. 如图所示,将一根不能伸长的柔软的轻绳的两端,分别系在两根立于水平地面的竖直杆不等高的两点,a、b上用一个滑轮O悬挂一个重物后放在绳子上(滑轮与绳间摩擦不计),达到平衡时两绳夹角∠aob为θ1;若将绳子b端慢慢向下移一段距离,将整个系统再次达到平衡时,两段绳子间的夹角为θ2,则( )
如图所示,将一根不能伸长的柔软的轻绳的两端,分别系在两根立于水平地面的竖直杆不等高的两点,a、b上用一个滑轮O悬挂一个重物后放在绳子上(滑轮与绳间摩擦不计),达到平衡时两绳夹角∠aob为θ1;若将绳子b端慢慢向下移一段距离,将整个系统再次达到平衡时,两段绳子间的夹角为θ2,则( )
如图所示,将一根不能伸长的柔软的轻绳的两端,分别系在两根立于水平地面的竖直杆不等高的两点,a、b上用一个滑轮O悬挂一个重物后放在绳子上(滑轮与绳间摩擦不计),达到平衡时两绳夹角∠aob为θ1;若将绳子b端慢慢向下移一段距离,将整个系统再次达到平衡时,两段绳子间的夹角为θ2,则( )| A. | θ1>θ2 | B. | θ1=θ2 | C. | θ2<θ1 | D. | 不确定 |
9.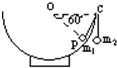 如图所示,轻绳两端分别系上m1和m2两小球,m1沿光滑圆形碗面滑到P点处于平衡,碗心为O,OC水平,C处光滑,∠COP=60°,碗对m1的压力为N,绳对m1的拉力为T,则( )
如图所示,轻绳两端分别系上m1和m2两小球,m1沿光滑圆形碗面滑到P点处于平衡,碗心为O,OC水平,C处光滑,∠COP=60°,碗对m1的压力为N,绳对m1的拉力为T,则( )
如图所示,轻绳两端分别系上m1和m2两小球,m1沿光滑圆形碗面滑到P点处于平衡,碗心为O,OC水平,C处光滑,∠COP=60°,碗对m1的压力为N,绳对m1的拉力为T,则( )| A. | N=T | B. | N=m2g | C. | N>T | D. | m1=3m2 |


 如图所示,在x轴上方有垂直于xy平面向里的匀强磁场,磁感应强度为B;在x轴下方有沿y轴负方向的匀强电场,场强为E.一质量为m,电量为-q的粒子从坐标原点O沿着y轴正方向射出.射出以后,它第三次到达x轴时,与点O的距离为L.不计粒子重力,求:
如图所示,在x轴上方有垂直于xy平面向里的匀强磁场,磁感应强度为B;在x轴下方有沿y轴负方向的匀强电场,场强为E.一质量为m,电量为-q的粒子从坐标原点O沿着y轴正方向射出.射出以后,它第三次到达x轴时,与点O的距离为L.不计粒子重力,求:
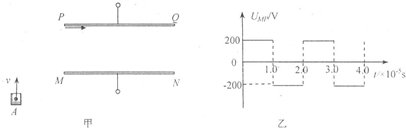
5.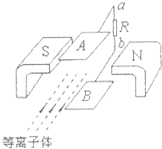 磁流体发电机的发电原理如图所示:将一束等离子体(即高温下电离的气体,含有大量的带正电和带负电的微粒,从整体上呈中性),喷射入磁场,在场中有两块金属板A、B,这时金属板上就会聚集电荷,产生电压.如果射入的等离子体的速度为v,金属平板的面积为S,板间距离为d,匀强磁场磁感应强度为B,方向与v垂直,电阻R接在两极之间.设电离气体充满两板间的空间,其电阻率为ρ,则以下说法中正确的是( )
磁流体发电机的发电原理如图所示:将一束等离子体(即高温下电离的气体,含有大量的带正电和带负电的微粒,从整体上呈中性),喷射入磁场,在场中有两块金属板A、B,这时金属板上就会聚集电荷,产生电压.如果射入的等离子体的速度为v,金属平板的面积为S,板间距离为d,匀强磁场磁感应强度为B,方向与v垂直,电阻R接在两极之间.设电离气体充满两板间的空间,其电阻率为ρ,则以下说法中正确的是( )
0 140610 140618 140624 140628 140634 140636 140640 140646 140648 140654 140660 140664 140666 140670 140676 140678 140684 140688 140690 140694 140696 140700 140702 140704 140705 140706 140708 140709 140710 140712 140714 140718 140720 140724 140726 140730 140736 140738 140744 140748 140750 140754 140760 140766 140768 140774 140778 140780 140786 140790 140796 140804 176998
磁流体发电机的发电原理如图所示:将一束等离子体(即高温下电离的气体,含有大量的带正电和带负电的微粒,从整体上呈中性),喷射入磁场,在场中有两块金属板A、B,这时金属板上就会聚集电荷,产生电压.如果射入的等离子体的速度为v,金属平板的面积为S,板间距离为d,匀强磁场磁感应强度为B,方向与v垂直,电阻R接在两极之间.设电离气体充满两板间的空间,其电阻率为ρ,则以下说法中正确的是( )| A. | 电流方向为a→R→b | |
| B. | 通过电阻R的电流大小为I=$\frac{BdvS}{RS+ρd}$ | |
| C. | 两板间的电压为U=Bdv | |
| D. | 两板间电压为U=$\frac{BdvSR}{RS+ρd}$ |