8.如图所示,a、b、c是环绕地球圆形轨道上运行的3颗人造卫星,它们的质量关系是ma=mb<mc,则( )

| A. | b、c的线速度大小相等,且小于a的线速度 | |
| B. | b、c的周期相等,且小于a的周期 | |
| C. | b、c的向心加速度大小相等,且小于a的向心加速度 | |
| D. | b、c所需向心力相等,且小于a所需的向心力 |
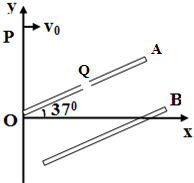
7. 在如图所示的电路中,E、r为电源的电动势和内阻,R1和R3为定值电阻,R2为滑动变阻器.当R2的滑动触点在a端时合上开关S,此时三个电表A1、A2和V的示数分别为I1、I2和U.现将R2的滑动触点向b端移动,则三个电表示数的变化情况是( )
在如图所示的电路中,E、r为电源的电动势和内阻,R1和R3为定值电阻,R2为滑动变阻器.当R2的滑动触点在a端时合上开关S,此时三个电表A1、A2和V的示数分别为I1、I2和U.现将R2的滑动触点向b端移动,则三个电表示数的变化情况是( )
在如图所示的电路中,E、r为电源的电动势和内阻,R1和R3为定值电阻,R2为滑动变阻器.当R2的滑动触点在a端时合上开关S,此时三个电表A1、A2和V的示数分别为I1、I2和U.现将R2的滑动触点向b端移动,则三个电表示数的变化情况是( )| A. | I1增大,I2不变,U增大 | B. | I1增大,I2减小,U增大 | ||
| C. | I1减小,I2增大,U减小 | D. | I1减小,I2不变,U减小 |
 板长为L=0.12m的带电平行金属板A、B,已知A板带负电,电场强度E=1×103V/m,放置于竖直平面内的xOy坐标系中,y轴竖直向上,金属板平面与水平面成37°角,A板的一端在坐标原点上,且中心开有小孔Q,如图所示.质量为m=5×10-3kg、带电量为+q=4×10-5C的小球从y轴上某点P水平抛出,恰好垂直于A板从其中心小孔Q进入两板间,则小球刚好从B板边缘射出电场,计算时sin37°=0.6,cos37°=0.8,g=10m/s2.求:
板长为L=0.12m的带电平行金属板A、B,已知A板带负电,电场强度E=1×103V/m,放置于竖直平面内的xOy坐标系中,y轴竖直向上,金属板平面与水平面成37°角,A板的一端在坐标原点上,且中心开有小孔Q,如图所示.质量为m=5×10-3kg、带电量为+q=4×10-5C的小球从y轴上某点P水平抛出,恰好垂直于A板从其中心小孔Q进入两板间,则小球刚好从B板边缘射出电场,计算时sin37°=0.6,cos37°=0.8,g=10m/s2.求:
5.电场线上每一点的切线方向,表示那一点的( )
| A. | 负电荷所受电场力的方向 | B. | 电场强度的方向 | ||
| C. | 电荷运动的方向 | D. | 电场强度的反方向 |
4.感应电动势的单位是什么?( )
| A. | 伏特V | B. | 库仑 C | C. | 韦伯Wb | D. | 安培A |
3.电容的单位是什么?( )
| A. | 伏特V | B. | 库仑C | C. | 法拉F | D. | 安培A |
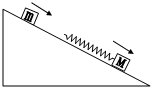 质量m和M的两木块分别以V1和V2的速度沿粗糙无限长的斜面匀速下滑.已知斜面固定,V1>V2.求两木块发生相互作用的过程中,轻质弹簧能达到的最大弹性势能.
质量m和M的两木块分别以V1和V2的速度沿粗糙无限长的斜面匀速下滑.已知斜面固定,V1>V2.求两木块发生相互作用的过程中,轻质弹簧能达到的最大弹性势能.
1.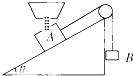 如图所示,A是一质量为M的盒子,B的质量为m,A、B用细绳相连,跨过光滑的定滑轮,A置于倾角θ的斜面上,B悬于斜面之外而处于静止状态.现在向A中缓慢加入沙子,整个系统始终保持静止,则在加入沙子的过程中,以下说法正确的是( )
如图所示,A是一质量为M的盒子,B的质量为m,A、B用细绳相连,跨过光滑的定滑轮,A置于倾角θ的斜面上,B悬于斜面之外而处于静止状态.现在向A中缓慢加入沙子,整个系统始终保持静止,则在加入沙子的过程中,以下说法正确的是( )
0 138779 138787 138793 138797 138803 138805 138809 138815 138817 138823 138829 138833 138835 138839 138845 138847 138853 138857 138859 138863 138865 138869 138871 138873 138874 138875 138877 138878 138879 138881 138883 138887 138889 138893 138895 138899 138905 138907 138913 138917 138919 138923 138929 138935 138937 138943 138947 138949 138955 138959 138965 138973 176998
如图所示,A是一质量为M的盒子,B的质量为m,A、B用细绳相连,跨过光滑的定滑轮,A置于倾角θ的斜面上,B悬于斜面之外而处于静止状态.现在向A中缓慢加入沙子,整个系统始终保持静止,则在加入沙子的过程中,以下说法正确的是( )| A. | 绳子拉力逐渐增大 | B. | A对斜面的压力逐渐增大 | ||
| C. | A所受的摩擦力逐渐增大 | D. | 地面对斜面没有摩擦力 |
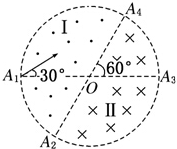 如图所示,在一个圆形区域内,两个方向相反且都垂直于纸面的匀强磁场分布在以直径A2A4为边界的两个半圆形区域Ⅰ、Ⅱ中,直径A2A4与A1A3的夹角为60°,一质量为m、带电荷量为+q的粒子以某一速度从Ⅰ区的边缘点A1处沿与A1A3成30°角的方向射入磁场,随后该粒子以垂直于A2A4的方向经过圆心O进入Ⅱ区,最后再从A4处射出磁场.已知该粒子从射入到射出磁场所用的时间为t,(忽略粒子重力),求:
如图所示,在一个圆形区域内,两个方向相反且都垂直于纸面的匀强磁场分布在以直径A2A4为边界的两个半圆形区域Ⅰ、Ⅱ中,直径A2A4与A1A3的夹角为60°,一质量为m、带电荷量为+q的粒子以某一速度从Ⅰ区的边缘点A1处沿与A1A3成30°角的方向射入磁场,随后该粒子以垂直于A2A4的方向经过圆心O进入Ⅱ区,最后再从A4处射出磁场.已知该粒子从射入到射出磁场所用的时间为t,(忽略粒子重力),求: