3.以下关于功和能的说法正确的是( )
| A. | 功是矢量,能是标量 | |
| B. | 功和能都是状态量,能可以用来做功 | |
| C. | 功是能量转化的量度 | |
| D. | 因为功和能的单位都是焦耳,所以功就是能 |
1.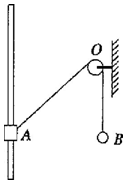 如图所示,一轻绳通过无摩擦的小定滑轮O与小球B连接,另一端与套在光滑竖直杆上的小物块A连接,杆两端固定且足够长.物块A由静止从图示位置释放后,先沿杆向上运动.设某时刻物块A运动的速度大小为vA,小球B运动的速度大小为vB,轻绳与杆的夹角为θ(θ<90°),则( )
如图所示,一轻绳通过无摩擦的小定滑轮O与小球B连接,另一端与套在光滑竖直杆上的小物块A连接,杆两端固定且足够长.物块A由静止从图示位置释放后,先沿杆向上运动.设某时刻物块A运动的速度大小为vA,小球B运动的速度大小为vB,轻绳与杆的夹角为θ(θ<90°),则( )
如图所示,一轻绳通过无摩擦的小定滑轮O与小球B连接,另一端与套在光滑竖直杆上的小物块A连接,杆两端固定且足够长.物块A由静止从图示位置释放后,先沿杆向上运动.设某时刻物块A运动的速度大小为vA,小球B运动的速度大小为vB,轻绳与杆的夹角为θ(θ<90°),则( )| A. | vB=vAcosθ | |
| B. | vA=vBcosθ | |
| C. | 小球B向下运动过程中,其动能一直增大 | |
| D. | 物块A上升到与滑轮等高处时,它的机械能最大 |
20. 一个小球自一定高度自由下落,恰好打在下方直立并固定于地面的轻质弹簧上,如图所示.小球从接触弹簧到将弹簧压至最短的过程中( )
一个小球自一定高度自由下落,恰好打在下方直立并固定于地面的轻质弹簧上,如图所示.小球从接触弹簧到将弹簧压至最短的过程中( )
一个小球自一定高度自由下落,恰好打在下方直立并固定于地面的轻质弹簧上,如图所示.小球从接触弹簧到将弹簧压至最短的过程中( )| A. | 小球做减速运动 | |
| B. | 小球的机械能守恒 | |
| C. | 弹簧压至最短时,小球的加速度最大 | |
| D. | 弹簧压至最短时,小球处于平衡状态 |
19.一带电小球在从空中的P点运动到Q点的过程中,重力做功6J,克服电场力做功1J,克服空气阻力做功2J,则下列判断正确的是( )
| A. | 在P点的动能比在Q点大3 J | B. | 在P点的重力势能比在Q点小6 J | ||
| C. | 在P点的电势能比在Q点大1 J | D. | 在P点的机械能比在Q点大3 J |
18. 如图所示是“抓娃娃机”的照片,使用者可凭自己的技术操控机械爪抓住透明箱内的玩具,提升至一定高度后水平移动到出口就可取得玩具,关于这一操作过程,下列说法正确的是( )
如图所示是“抓娃娃机”的照片,使用者可凭自己的技术操控机械爪抓住透明箱内的玩具,提升至一定高度后水平移动到出口就可取得玩具,关于这一操作过程,下列说法正确的是( )
如图所示是“抓娃娃机”的照片,使用者可凭自己的技术操控机械爪抓住透明箱内的玩具,提升至一定高度后水平移动到出口就可取得玩具,关于这一操作过程,下列说法正确的是( )| A. | 机械爪抓到玩具匀速上升时,玩具的机械能守恒 | |
| B. | 玩具从机械爪中掉下,玩具的动能增加,机械能增加 | |
| C. | 机械爪抓到玩具水平匀速移动时,机械爪对玩具不做功 | |
| D. | 机械爪抓到玩具匀速上升时,机械爪做的功等于零 |
 如图,小球套在光滑的竖直杆上,轻弹簧一端固定于O点,另一端与小球相连,现将小球从M点由静止释放,下降过程中先经过与O等高的P点,然后到达下方的N点,已知小球经M、N点时,弹簧的压缩量与伸长量相等,小球质量为m,重力加速度为g.
如图,小球套在光滑的竖直杆上,轻弹簧一端固定于O点,另一端与小球相连,现将小球从M点由静止释放,下降过程中先经过与O等高的P点,然后到达下方的N点,已知小球经M、N点时,弹簧的压缩量与伸长量相等,小球质量为m,重力加速度为g.
15.关于能量和能源,下列说法正确的是( )
0 138023 138031 138037 138041 138047 138049 138053 138059 138061 138067 138073 138077 138079 138083 138089 138091 138097 138101 138103 138107 138109 138113 138115 138117 138118 138119 138121 138122 138123 138125 138127 138131 138133 138137 138139 138143 138149 138151 138157 138161 138163 138167 138173 138179 138181 138187 138191 138193 138199 138203 138209 138217 176998
| A. | 能量在转化和转移过程中,其总量会不断减少,所以要节约能源 | |
| B. | 能量在转化和转移过程中,其总量会不断增加,所以没有必要节约能源 | |
| C. | 能量在转化的转移过程中,其总量保持不变 | |
| D. | 在能源的利用过程中,能源在可利用的品质上降低了 |
 如图所示,质量为m的小球用长为L的轻质细线悬于O点,与O点处于同一水平线上的P点处有一个光滑的细钉,已知OP=$\frac{L}{2}$,在A点给小球一个水平向左的初速度v0=3$\sqrt{gL}$,发现小球恰能达到跟P点在同一竖直线上的最高点B,重力加速度为g,(绳不会拉断).求:小球克服空气阻力做的功.
如图所示,质量为m的小球用长为L的轻质细线悬于O点,与O点处于同一水平线上的P点处有一个光滑的细钉,已知OP=$\frac{L}{2}$,在A点给小球一个水平向左的初速度v0=3$\sqrt{gL}$,发现小球恰能达到跟P点在同一竖直线上的最高点B,重力加速度为g,(绳不会拉断).求:小球克服空气阻力做的功.