5.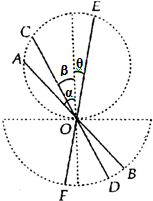 如图所示,有一半圆,其直径水平且与另一圆的底部相切于O点,O点恰好是下半圆的圆心,现在有三条光滑轨道AB、CD、EF,它们的上下端分别位于上下两圆的圆周上,三轨道都经过切点O,轨道与竖直线的夹角关系为α>β>θ,现在让一物块先后从三轨道顶端由静止下滑至底端,则物块在每一条倾斜轨道上滑动时所经历的时间关系为( )
如图所示,有一半圆,其直径水平且与另一圆的底部相切于O点,O点恰好是下半圆的圆心,现在有三条光滑轨道AB、CD、EF,它们的上下端分别位于上下两圆的圆周上,三轨道都经过切点O,轨道与竖直线的夹角关系为α>β>θ,现在让一物块先后从三轨道顶端由静止下滑至底端,则物块在每一条倾斜轨道上滑动时所经历的时间关系为( )
如图所示,有一半圆,其直径水平且与另一圆的底部相切于O点,O点恰好是下半圆的圆心,现在有三条光滑轨道AB、CD、EF,它们的上下端分别位于上下两圆的圆周上,三轨道都经过切点O,轨道与竖直线的夹角关系为α>β>θ,现在让一物块先后从三轨道顶端由静止下滑至底端,则物块在每一条倾斜轨道上滑动时所经历的时间关系为( )| A. | tAB=tCD=tEF | B. | tAB>tCD>tEF | C. | tAB<tCD<tEF | D. | tAB=tCD<tEF |
4.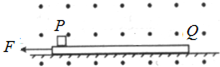 如图所示,质量为M的绝缘足够长的木板Q放置在光滑的水平面上.质量为m的物块P叠放在Q的左端,PQ所在空间存在着如图所示的匀强磁场,磁感应强度大小为B.P带正电,电荷量为q,Q不带电,P、Q之间的动摩擦困数为μ.一水平恒力F作用在Q上,使P、Q由静止开始向左运动.在运动的过程中,下列说法正确的是( )
如图所示,质量为M的绝缘足够长的木板Q放置在光滑的水平面上.质量为m的物块P叠放在Q的左端,PQ所在空间存在着如图所示的匀强磁场,磁感应强度大小为B.P带正电,电荷量为q,Q不带电,P、Q之间的动摩擦困数为μ.一水平恒力F作用在Q上,使P、Q由静止开始向左运动.在运动的过程中,下列说法正确的是( )
如图所示,质量为M的绝缘足够长的木板Q放置在光滑的水平面上.质量为m的物块P叠放在Q的左端,PQ所在空间存在着如图所示的匀强磁场,磁感应强度大小为B.P带正电,电荷量为q,Q不带电,P、Q之间的动摩擦困数为μ.一水平恒力F作用在Q上,使P、Q由静止开始向左运动.在运动的过程中,下列说法正确的是( )| A. | P和Q一起运动时,PQ间的摩擦力逐渐减小 | |
| B. | P刚好脱离Q时,P的速度大小为$\frac{mg}{Bq}$ | |
| C. | P脱离Q后,Q做匀速直线运动 | |
| D. | P、Q刚好发生相对滑动时P的速度大小为$\frac{mg}{Bq}$-$\frac{Fm}{μBq(M+m)}$ |
3.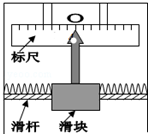 惯性制导已广泛应用于弹道式导弹工程中,这个系统的重要元件之一是“加速度计”.加速度计的构造原理的示意图如图所示,沿导弹长度方向安装的固定光滑杆上套一质量为m的滑块,滑块两侧分别与劲度系数均为k的弹簧相连,两弹簧的另一端与固定壁相连,滑块原来静止,弹簧处于自然长度,滑块上有指针,可通过标尺测出滑块的位移,然后通过控制系统进行制导.设某段时间内导弹沿水平方向运动,指针向左偏离O点的距离为x,则这段时间内导弹的加速度( )
惯性制导已广泛应用于弹道式导弹工程中,这个系统的重要元件之一是“加速度计”.加速度计的构造原理的示意图如图所示,沿导弹长度方向安装的固定光滑杆上套一质量为m的滑块,滑块两侧分别与劲度系数均为k的弹簧相连,两弹簧的另一端与固定壁相连,滑块原来静止,弹簧处于自然长度,滑块上有指针,可通过标尺测出滑块的位移,然后通过控制系统进行制导.设某段时间内导弹沿水平方向运动,指针向左偏离O点的距离为x,则这段时间内导弹的加速度( )
惯性制导已广泛应用于弹道式导弹工程中,这个系统的重要元件之一是“加速度计”.加速度计的构造原理的示意图如图所示,沿导弹长度方向安装的固定光滑杆上套一质量为m的滑块,滑块两侧分别与劲度系数均为k的弹簧相连,两弹簧的另一端与固定壁相连,滑块原来静止,弹簧处于自然长度,滑块上有指针,可通过标尺测出滑块的位移,然后通过控制系统进行制导.设某段时间内导弹沿水平方向运动,指针向左偏离O点的距离为x,则这段时间内导弹的加速度( )| A. | 方向向右,大小为$\frac{2kx}{m}$ | B. | 方向向左,大小为$\frac{2kx}{m}$ | ||
| C. | 方向向右,大小为$\frac{kx}{m}$ | D. | 方向向左,大小为$\frac{kx}{m}$ |
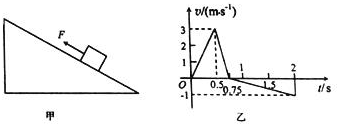
1.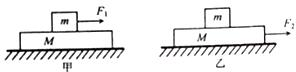 质量均为M的两木板放在光滑水平面上,两木板的中点各放置完全相同、质量均为m的物块,已知M>m.现从静止开始分别在物块和木板上各作用水平恒力F1、F2,如图甲、乙所示.已知物块和木板之间的动摩擦因数相同,两木板长度也相同.下列说法正确的是( )
质量均为M的两木板放在光滑水平面上,两木板的中点各放置完全相同、质量均为m的物块,已知M>m.现从静止开始分别在物块和木板上各作用水平恒力F1、F2,如图甲、乙所示.已知物块和木板之间的动摩擦因数相同,两木板长度也相同.下列说法正确的是( )
质量均为M的两木板放在光滑水平面上,两木板的中点各放置完全相同、质量均为m的物块,已知M>m.现从静止开始分别在物块和木板上各作用水平恒力F1、F2,如图甲、乙所示.已知物块和木板之间的动摩擦因数相同,两木板长度也相同.下列说法正确的是( )| A. | 甲图中,无沦F1的大小如何,只要F1作用时间足够长,则物块和木板就可分离 | |
| B. | 乙图中,只有F2的大小大于某一值时,才可能使物块和木板分离 | |
| C. | 使物块和木板分离的最小作用力F1>F2 | |
| D. | 使物块和木板分离的最小作用力F1<F2 |

19. 如图所示,光滑的水平地面上有三块木块a、b、c,质量均为m,a、c之间用轻质细绳连接.现用一水平恒力F作用在b上,三者开始一起做匀加速运动,a、c间细绳的拉力为T,a、b间的摩擦力为f.运动过程中把一块橡皮泥粘在木块a上,系统仍加速运动,且a、b、c之间始终没有相对滑动.稳定后,T和f的变化情况是( )
如图所示,光滑的水平地面上有三块木块a、b、c,质量均为m,a、c之间用轻质细绳连接.现用一水平恒力F作用在b上,三者开始一起做匀加速运动,a、c间细绳的拉力为T,a、b间的摩擦力为f.运动过程中把一块橡皮泥粘在木块a上,系统仍加速运动,且a、b、c之间始终没有相对滑动.稳定后,T和f的变化情况是( )
如图所示,光滑的水平地面上有三块木块a、b、c,质量均为m,a、c之间用轻质细绳连接.现用一水平恒力F作用在b上,三者开始一起做匀加速运动,a、c间细绳的拉力为T,a、b间的摩擦力为f.运动过程中把一块橡皮泥粘在木块a上,系统仍加速运动,且a、b、c之间始终没有相对滑动.稳定后,T和f的变化情况是( )| A. | T变大,f变小 | B. | T变大,f变大 | C. | T变小,f变小 | D. | T变小,f变大 |
18. 如图所示,A、B两物块的质量分别为2m和m,静止叠放在水平地面上.A、B间的动摩擦因数为μ,B与地面间的动摩擦因数为0.5μ.最大静摩擦力等于滑动摩擦力,重力加速度为g.现对A施加一水平拉力F,则( )
如图所示,A、B两物块的质量分别为2m和m,静止叠放在水平地面上.A、B间的动摩擦因数为μ,B与地面间的动摩擦因数为0.5μ.最大静摩擦力等于滑动摩擦力,重力加速度为g.现对A施加一水平拉力F,则( )
0 134912 134920 134926 134930 134936 134938 134942 134948 134950 134956 134962 134966 134968 134972 134978 134980 134986 134990 134992 134996 134998 135002 135004 135006 135007 135008 135010 135011 135012 135014 135016 135020 135022 135026 135028 135032 135038 135040 135046 135050 135052 135056 135062 135068 135070 135076 135080 135082 135088 135092 135098 135106 176998
如图所示,A、B两物块的质量分别为2m和m,静止叠放在水平地面上.A、B间的动摩擦因数为μ,B与地面间的动摩擦因数为0.5μ.最大静摩擦力等于滑动摩擦力,重力加速度为g.现对A施加一水平拉力F,则( )| A. | 当F<2 μmg时,A、B都相对地面静止 | |
| B. | 当F>3 μmg时,A相对B滑动 | |
| C. | 当F=2.5μmg时,A的加速度为0.25μg | |
| D. | 无论F 为何值,B的加速度不会超过$\frac{1}{2}$μg |
 如图所示,质量m=2kg的金属块(可视为质点)静止于水平平台上的A点,金属块与平台之间动摩擦因数为0.5,平台距地面(未画出)高3.2m,A点距离平台边沿11.25m,现施加一与水平方向成θ=37°角斜向上、大小为F=20N的拉力,作用一段距离后撤去,金属块继续在平台上滑行距离x后飞出,落地速度与竖直方向夹角为37°(cos37°=0.8,sin37°=0.6,g=10m/s2)求:
如图所示,质量m=2kg的金属块(可视为质点)静止于水平平台上的A点,金属块与平台之间动摩擦因数为0.5,平台距地面(未画出)高3.2m,A点距离平台边沿11.25m,现施加一与水平方向成θ=37°角斜向上、大小为F=20N的拉力,作用一段距离后撤去,金属块继续在平台上滑行距离x后飞出,落地速度与竖直方向夹角为37°(cos37°=0.8,sin37°=0.6,g=10m/s2)求: