19.一个做匀变速直线运动的物体,其位移和时间的关系是:x=18t-3t2,则它的速度大小为12m/s的时刻是( )
| A. | 0.5s | B. | 1s | C. | 3s | D. | 5s |
18.有关等势面的说法中正确的有( )
| A. | 等势面一定与电场线垂直,即跟场强的方向垂直 | |
| B. | 电场线总是由电势高的等势面指向电势低的等势面,两个不同的等势面永远不会相交 | |
| C. | 两个等势面间的电势差是相等的,但在非匀强电场中.两个等势面间的距离并不恒定,场强大的地方.两等势面间的距离小,场强小的地方,两个等势面间的距离大 | |
| D. | 在同一等势面上移动电荷时,电场力不做功 |
17.物体在拉力F的作用下,沿水平方向的位移为x.在此过程中拉力对物体做的功为( )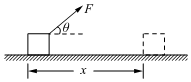
| A. | Fx | B. | Fxsinθ | C. | Fxcosθ | D. | Fxtanθ |
 现代质谱仪可用来分析比质子重很多倍的离子,其示意图如图所示,其中磁感应强度恒定.质子在入口处从静止开始被加速电场加速,经匀强磁场偏转后从出口离开磁场.若某种2价正离子在入口处从静止开始被加速电场加速,为使它经同一匀强磁场偏转后仍从同一出口离开磁场,需将加速电压减小到原来的$\frac{1}{12}$倍.此离子和质子的质量比约为( )
现代质谱仪可用来分析比质子重很多倍的离子,其示意图如图所示,其中磁感应强度恒定.质子在入口处从静止开始被加速电场加速,经匀强磁场偏转后从出口离开磁场.若某种2价正离子在入口处从静止开始被加速电场加速,为使它经同一匀强磁场偏转后仍从同一出口离开磁场,需将加速电压减小到原来的$\frac{1}{12}$倍.此离子和质子的质量比约为( )
14. 如图为用来冶炼合金钢的真空冶炼炉,炉外有线圈,将金属材料置于冶炼炉中,当线圈中通以电流时用感应加热的方法使炉内金属发热.下列说法中正确的是( )
如图为用来冶炼合金钢的真空冶炼炉,炉外有线圈,将金属材料置于冶炼炉中,当线圈中通以电流时用感应加热的方法使炉内金属发热.下列说法中正确的是( )
如图为用来冶炼合金钢的真空冶炼炉,炉外有线圈,将金属材料置于冶炼炉中,当线圈中通以电流时用感应加热的方法使炉内金属发热.下列说法中正确的是( )| A. | 线圈中通以恒定电流,金属材料中也能产生感应电流 | |
| B. | 线圈中通以正弦交流电,在金属材料中产生的涡流也是交流电 | |
| C. | 感应加热是利用金属材料中的涡流冶炼金属的 | |
| D. | 感应加热是利用线圈电阻产生的焦耳热冶炼金属的 |
13.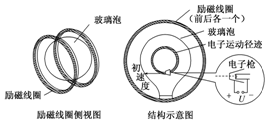 洛伦兹力演示仪是由励磁线圈、洛伦兹力管和电源控制部分组成的,其部分结构如图所示.现给励磁线圈通电,电子枪垂直磁场方向向左发射电子,形成如“结构示意图”所示的圆形径迹,则( )
洛伦兹力演示仪是由励磁线圈、洛伦兹力管和电源控制部分组成的,其部分结构如图所示.现给励磁线圈通电,电子枪垂直磁场方向向左发射电子,形成如“结构示意图”所示的圆形径迹,则( )
洛伦兹力演示仪是由励磁线圈、洛伦兹力管和电源控制部分组成的,其部分结构如图所示.现给励磁线圈通电,电子枪垂直磁场方向向左发射电子,形成如“结构示意图”所示的圆形径迹,则( )| A. | 励磁线圈通有逆时针方向的电流 | |
| B. | 若只增大加速电压,可以使电子流的圆形径迹半径增大 | |
| C. | 若只增大励磁线圈中的电流,可以使电子流的圆形径迹半径增大 | |
| D. | 若已知电子的比荷,灯丝发出的电子的初速为零,加速电压为U,则可通过测量圆形径迹的直径来估算两线圈间的磁感应强度 |
12. 如图所示,一固定容器的内壁是半径为R的半球面,在半球面水平直径的一端有一质量为m的质点P.它在容器内壁由静止下滑到最低点的过程中,克服摩擦力做的功为W.重力加速度大小为g.设质点P在最低点时,向心加速度的大小为a,速度为v,容器对它的支持力大小为N,则( )
如图所示,一固定容器的内壁是半径为R的半球面,在半球面水平直径的一端有一质量为m的质点P.它在容器内壁由静止下滑到最低点的过程中,克服摩擦力做的功为W.重力加速度大小为g.设质点P在最低点时,向心加速度的大小为a,速度为v,容器对它的支持力大小为N,则( )
如图所示,一固定容器的内壁是半径为R的半球面,在半球面水平直径的一端有一质量为m的质点P.它在容器内壁由静止下滑到最低点的过程中,克服摩擦力做的功为W.重力加速度大小为g.设质点P在最低点时,向心加速度的大小为a,速度为v,容器对它的支持力大小为N,则( )| A. | a=$\frac{2(mgR-W)}{mR}$ | B. | v=$\sqrt{\frac{2(mgR-W)}{m}}$ | C. | N=$\frac{3mgR-2W}{R}$ | D. | N=$\frac{2(mgR-W)}{R}$ |
11.传感器和计算机结合,可以快速测量和记录变化的力.如下图所示,传感器和计算机连接,弹性细绳一端系小球另一端与传感器连接,把小球举到O点,放手让小球自由下落同时开始计时,计算机通过传感器获得弹性细绳中拉力F随时间t变化的图线.不计空气阻力,弹性细绳一直在弹性限度内.根据图线可以判断( )
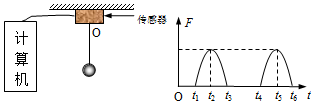
| A. | 细绳的自然长度是$\frac{1}{2}$gt22 | |
| B. | t1~t2时间内小球一直处于失重状态 | |
| C. | 2t1=t4-t3 | |
| D. | 从t2~t3,小球的速度先增大后减小 |
10.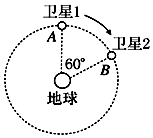 如图所示,北斗导航系统中两颗卫星,均为地球同步卫星.某时刻位于轨道上的A、B两位置.设地球表面处的重力加速度为g,地球半径为R,地球自转周期为T.则( )
如图所示,北斗导航系统中两颗卫星,均为地球同步卫星.某时刻位于轨道上的A、B两位置.设地球表面处的重力加速度为g,地球半径为R,地球自转周期为T.则( )
0 134446 134454 134460 134464 134470 134472 134476 134482 134484 134490 134496 134500 134502 134506 134512 134514 134520 134524 134526 134530 134532 134536 134538 134540 134541 134542 134544 134545 134546 134548 134550 134554 134556 134560 134562 134566 134572 134574 134580 134584 134586 134590 134596 134602 134604 134610 134614 134616 134622 134626 134632 134640 176998
如图所示,北斗导航系统中两颗卫星,均为地球同步卫星.某时刻位于轨道上的A、B两位置.设地球表面处的重力加速度为g,地球半径为R,地球自转周期为T.则( )| A. | 两卫星线速度大小均为$\frac{2πR}{T}$ | |
| B. | 两卫星轨道半径均为${\;}^3\sqrt{{{({\frac{RT}{2π}})}^2}g}$ | |
| C. | 卫星1由A运动到B所需的最短时间为$\frac{T}{3}$ | |
| D. | 卫星1和卫星2受到的引力一定相同 |