题目内容
16.如图甲所示,某同学在竖直上升的升降机内研究升降机的运动规律.他在升降机的水平底板上安放了一台压力传感器(能及时准确显示压力大小),压力传感器上表面水平,上面放置了一个质量为1kg的木块,在t=0时刻升降机从地面由静止开始上升,在t=10s时上升了H,并且速度恰好减为零.他根据记录的压力数据绘制了压力随时间变化的关系图象,如图乙所示.请你根据题中所给条件和图象信息回答题中所给的10s内,升降机上升的高度H为多少?(取g=10m/s2)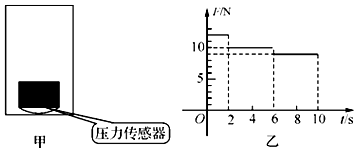
分析 根据牛顿第二定律求出匀加速直线运动的加速度,结合速度时间求出匀加速直线运动的末速度,根据位移公式求出匀速运动的位移,结合平均速度推论求出匀减速直线运动的位移,从而得出升降机上升的总高度.
解答 解:小木块受到重力和支持力两个力作用,由图象可以看出,升降机在0~2 s内向上做匀加速直线运动,由牛顿第二定律得:
F-mg=ma1
解得:a1=$\frac{F-mg}{m}=\frac{12-10}{1}m/{s}^{2}$=2 m/s2
由运动学公式x1=$\frac{1}{2}$a1t12,
解得升降机在0~2 s内上升的高度为:x1=$\frac{1}{2}×2×4m$=4 m.
2s末的速度为:v=a1t1=2×2m/s=4m/s,
在2~6 s内升降机做匀速运动的位移为:x2=vt2=4×4=16 m
在6~10 s内升降机做匀减速运动的位移为:x3=$\frac{1}{2}$v t3=$\frac{1}{2}×4×4m$=8 m,
故升降机在10 s内上升的总高度为:H=x1+x2+x3=4+16+8m=28 m.
答:升降机上升的高度H为28m.
点评 解决本题的关键理清升降机在整个过程中的运动规律,结合牛顿第二定律和运动学公式综合求解,知道加速度是联系力学和运动学的桥梁.

练习册系列答案
相关题目
6.将一个小球从光滑水平地面上一点抛出,小球的初始水平速度为u,竖直方向速度为v,忽略空气阻力,小球第一次到达最高点时离地面的距离为h.小球和地面发生第一次碰撞后,反弹至离地面$\frac{h}{4}$的高度.以后每一次碰撞后反弹的高度都是前一次的$\frac{1}{4}$(每次碰撞前后小球的水平速度不变),小球在停止弹跳时所移动的总水平距离的极限是( )
| A. | $\frac{uv}{g}$ | B. | $\frac{2uv}{g}$ | C. | $\frac{3uv}{g}$ | D. | $\frac{4uv}{g}$ |
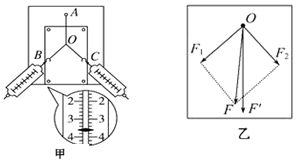 “研究共点力的合成”的实验情况如图甲所示,其中A为固定橡皮筋的图钉,O为橡皮筋与细绳的结点,OB和OC为细绳,图乙是在白纸上根据实验结果画出的图示.
“研究共点力的合成”的实验情况如图甲所示,其中A为固定橡皮筋的图钉,O为橡皮筋与细绳的结点,OB和OC为细绳,图乙是在白纸上根据实验结果画出的图示.
4.如图甲所示,100匝线圈(图中只画了1匝)两端A、B与一电压表相连.线圈内有一垂直指向纸内方向的磁场,线圈中的磁通量在按图乙所示规律变化.下列关于电压表的说法正确的是( )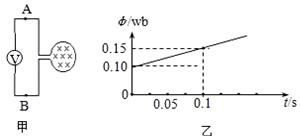
| A. | 电压表读数为50V | B. | 电压表读数为150V | ||
| C. | 电压表“+”接线柱接A端 | D. | 电压表“+”接线柱接B端 |
11. 如图所示,光滑绝缘细管与水平面成30°角,在管的上方P点固定一个点电荷+Q,P点与细管在同一竖直平面内,管的顶端A与P点连线水平.电荷量为-q的小球(小球直径略小于细管内径)从管中A处由静止开始沿管向下运动,在A处时小球的加速度为a.B是AC的中点,不考虑小球电荷量对+Q形成的电场的影响.则在的电场中( )
如图所示,光滑绝缘细管与水平面成30°角,在管的上方P点固定一个点电荷+Q,P点与细管在同一竖直平面内,管的顶端A与P点连线水平.电荷量为-q的小球(小球直径略小于细管内径)从管中A处由静止开始沿管向下运动,在A处时小球的加速度为a.B是AC的中点,不考虑小球电荷量对+Q形成的电场的影响.则在的电场中( )
如图所示,光滑绝缘细管与水平面成30°角,在管的上方P点固定一个点电荷+Q,P点与细管在同一竖直平面内,管的顶端A与P点连线水平.电荷量为-q的小球(小球直径略小于细管内径)从管中A处由静止开始沿管向下运动,在A处时小球的加速度为a.B是AC的中点,不考虑小球电荷量对+Q形成的电场的影响.则在的电场中( )| A. | A点的电势高于B点的电势 | |
| B. | B点的电场强度大小是A点的4倍 | |
| C. | 小球运动到C处的加速度为g-a | |
| D. | 小球从A到C的过程中电势能先减小后增大 |
 某次滑雪训练中,运动员站在水平雪道上,利用滑雪杖对雪面的作用获得水平推力.第一次获得推力F1=72N,作用时间t1=1.0s,运动员由静止向前滑行.撤除水平推力后,又经过t2=2.0 s他第二次利用滑雪杖的作用获得水平推力F2,作用时t3=0.5 s,F2作用时滑行距离与F1作用时滑行距离相同.已知该运动员连同装备的总质量为m=60kg,在整个运动过程中受到的滑动摩擦力大小恒为Ff=12 N,求:
某次滑雪训练中,运动员站在水平雪道上,利用滑雪杖对雪面的作用获得水平推力.第一次获得推力F1=72N,作用时间t1=1.0s,运动员由静止向前滑行.撤除水平推力后,又经过t2=2.0 s他第二次利用滑雪杖的作用获得水平推力F2,作用时t3=0.5 s,F2作用时滑行距离与F1作用时滑行距离相同.已知该运动员连同装备的总质量为m=60kg,在整个运动过程中受到的滑动摩擦力大小恒为Ff=12 N,求:
8. 如图所示,马拉着车在平直公路上行驶.关于马与车的相互作用,下列说法中正确的是( )
如图所示,马拉着车在平直公路上行驶.关于马与车的相互作用,下列说法中正确的是( )
如图所示,马拉着车在平直公路上行驶.关于马与车的相互作用,下列说法中正确的是( )| A. | 马拉车的力大于车拉马的力 | |
| B. | 马拉车的力小于车拉马的力 | |
| C. | 马拉车的力与车拉马的力,只有在车匀速运动时大小才相等 | |
| D. | 马拉车的力与车拉马的力大小始终相等,与车做何种运动无关 |
5. 我们的家乡雅安是中国优秀旅游城市.“马踏飞燕”是“中国优秀旅游城市”标志.如图所示,飞奔的骏马三足腾空,只用一只蹄就能稳稳地踏在飞翔的燕子上,是因为( )
我们的家乡雅安是中国优秀旅游城市.“马踏飞燕”是“中国优秀旅游城市”标志.如图所示,飞奔的骏马三足腾空,只用一只蹄就能稳稳地踏在飞翔的燕子上,是因为( )
我们的家乡雅安是中国优秀旅游城市.“马踏飞燕”是“中国优秀旅游城市”标志.如图所示,飞奔的骏马三足腾空,只用一只蹄就能稳稳地踏在飞翔的燕子上,是因为( )| A. | 马跑得快的缘故 | |
| B. | 马蹄大的缘故 | |
| C. | 马的重心在飞燕上 | |
| D. | 马的重心位置和飞燕在一条竖直线上 |
1. 在世界机器人大赛上.中科大“蓝鹰”队机器人“可佳”现要执行一项任务.给它设定了如下动作程序:机器人在平面内.由点(0,0)出发.沿直线运动到点(3,1).然后又由点(3,1)沿直线运动到点(1,4).然后又由点(1,4)沿直线运动到点(5,5).然后又由点(5,5)沿直线运动到点(2,2).该个过程中机器人所用时间是2$\sqrt{2}$s.则下列说法正确的是( )
在世界机器人大赛上.中科大“蓝鹰”队机器人“可佳”现要执行一项任务.给它设定了如下动作程序:机器人在平面内.由点(0,0)出发.沿直线运动到点(3,1).然后又由点(3,1)沿直线运动到点(1,4).然后又由点(1,4)沿直线运动到点(5,5).然后又由点(5,5)沿直线运动到点(2,2).该个过程中机器人所用时间是2$\sqrt{2}$s.则下列说法正确的是( )
在世界机器人大赛上.中科大“蓝鹰”队机器人“可佳”现要执行一项任务.给它设定了如下动作程序:机器人在平面内.由点(0,0)出发.沿直线运动到点(3,1).然后又由点(3,1)沿直线运动到点(1,4).然后又由点(1,4)沿直线运动到点(5,5).然后又由点(5,5)沿直线运动到点(2,2).该个过程中机器人所用时间是2$\sqrt{2}$s.则下列说法正确的是( )| A. | 机器人的运动轨迹是一条直线 | |
| B. | 机器人不会两次通过同一点 | |
| C. | 整个过程中机器人的位移大小为2$\sqrt{2}$m | |
| D. | 整个过程中机器人的平均速率为1m/s |