题目内容
14. 在空间站长期工作的宇航员体重会发生改变.为了检查宇航员的健康状况,宇航员要定期称量体重,但太空中宇航员的体重不能用体温计称量.
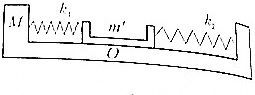
在空间站长期工作的宇航员体重会发生改变.为了检查宇航员的健康状况,宇航员要定期称量体重,但太空中宇航员的体重不能用体温计称量.科学家设计了图示的装置来“称量”宇航员的体重.其中,两个大小不同的凹形构建质量分别为m′与M,相互光滑接触,M固定于航天器上,m′(又称作踏板)通过两侧劲度系数分别为k1、k2的弹簧与M连接.
(1)试分析利用该装置“称量”宇航员体重的原理.
(2)简要写出宇航员利用该装置“称量”体重的操作步骤.
(3)试推导出用上述方法测定宇航员体重的公式.
分析 (1)该装置可以看做是弹簧振子,根据弹簧振子的周期公式可以求出宇航员的质量.
(2)然后宇航员做简谐振动测出其周期,然后求出宇航员的质量.
(3)根据弹簧振子周期公式可以求出宇航员的质量.
解答 解:(1)该装置可以看做弹簧振子,它可以做简谐运动,测出简谐运动的周期公式可以求出宇航员的质量.
(2)让宇航员躺在质量为m′的凹槽中,把m′拉离平衡位置,然后让其做简谐运动,测出其做简谐运动的周期T,然后求出宇航员的质量.
(3)弹簧的形变量为x时,回复力为:F=-(k1+k2)x,相当于劲度系数为k1+k2的弹簧振子,
由弹簧振子的周期公式得:T=2π$\sqrt{\frac{m+m′}{{k}_{1}+{k}_{2}}}$,宇航员的质量:m=$\frac{({k}_{1}+{k}_{2}){T}^{2}}{4{π}^{2}}$-m′;
答:(1)该装置的工作原理是利用弹簧振子的周期公式求质量.
(2)实验步骤:让宇航员躺在质量为m′的凹槽中,把m′拉离平衡位置,然后让其做简谐运动,测出其做简谐运动的周期T,然后求出宇航员的质量.
(3)宇航员的质量公式为:m=$\frac{({k}_{1}+{k}_{2}){T}^{2}}{4{π}^{2}}$-m′.
点评 本题是一道创新题,有新意,分析清楚该装置、理解其工作原理是解题的前提与关键,应用弹簧振子的周期公式可以解题.

练习册系列答案
 同步练习强化拓展系列答案
同步练习强化拓展系列答案
相关题目
4.在光滑的水平面上,用绳子系一小球做半径为R的匀速圆周运动,若绳子拉力为F,在小球经过$\frac{1}{4}$圆周的时间内,F所做的功为( )
| A. | 0 | B. | $\frac{1}{2}$RF | C. | RF | D. | $\sqrt{2}$RF |
5.下列说法正确的是( )
| A. | 物体在恒力作用下不可能做曲线运动 | |
| B. | 两个直线运动的合运动一定是直线运动 | |
| C. | 物体只有受到方向时刻变化的力的作用才可能做曲线运动 | |
| D. | 曲线运动一定是变速运动 |
2. 我国发射的“神舟”六号载人飞船,与“神舟”五号载人飞船相比,它在更高的轨道上绕地球做匀速圆周运动,如图所示,下列说法中正确的是( )
我国发射的“神舟”六号载人飞船,与“神舟”五号载人飞船相比,它在更高的轨道上绕地球做匀速圆周运动,如图所示,下列说法中正确的是( )
我国发射的“神舟”六号载人飞船,与“神舟”五号载人飞船相比,它在更高的轨道上绕地球做匀速圆周运动,如图所示,下列说法中正确的是( )| A. | “神舟”六号的速度与“神舟”五号的相同 | |
| B. | “神舟”六号的速度较小 | |
| C. | “神舟”六号的周期与“神舟”五号的相同 | |
| D. | “神舟”六号的周期更短 |
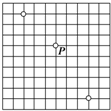 如图所示是某次实验中用频闪照相方法拍摄的小球(可视为质点)做平抛运动的闪光照片.如果图中每个方格的边长表示的实际距离l和闪光频率f为已知量,请写出计算平抛初速度v0的表达式:v0=3lf;计算当地重力加速度值g的表达式g=2lf2.
如图所示是某次实验中用频闪照相方法拍摄的小球(可视为质点)做平抛运动的闪光照片.如果图中每个方格的边长表示的实际距离l和闪光频率f为已知量,请写出计算平抛初速度v0的表达式:v0=3lf;计算当地重力加速度值g的表达式g=2lf2.
19.一质点做直线运动的v-t图象如图所示,则该质点( )
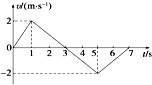
| A. | 在第3 s末回到零时刻所在的位置 | |
| B. | 在1 s~3 s的位移与3 s~5 s的位移不同 | |
| C. | 在0~7 s内的平均速度为0 | |
| D. | 在1 s~3s内受到的合外力与3 s~5 s内受到的合外力方向相反 |
6. 质量为0.1kg的小物块在粗糙水平桌面上滑行4m后以3.0m/s的速度飞离桌面,最终落在水平地面上,物块与桌面间的动摩擦因数为0.5,桌面高0.45m,不计空气阻力,取g=10m/s2,则( )
质量为0.1kg的小物块在粗糙水平桌面上滑行4m后以3.0m/s的速度飞离桌面,最终落在水平地面上,物块与桌面间的动摩擦因数为0.5,桌面高0.45m,不计空气阻力,取g=10m/s2,则( )
质量为0.1kg的小物块在粗糙水平桌面上滑行4m后以3.0m/s的速度飞离桌面,最终落在水平地面上,物块与桌面间的动摩擦因数为0.5,桌面高0.45m,不计空气阻力,取g=10m/s2,则( )| A. | 小物块的初速度是7 m/s | |
| B. | 小物块的水平射程为1.2 m | |
| C. | 小物块在桌面上克服摩擦力做8 J的功 | |
| D. | 小物块落地时的动能为1.2 J |
3.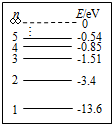 如图为氢原子的能级图,已知可见光的光子的能量范围为1.62~3.11eV,锌板的电子逸出功为3.34eV,那么对氢原子在能级跃迁的过程中辐射或吸收光子的特征认识正确的是( )
如图为氢原子的能级图,已知可见光的光子的能量范围为1.62~3.11eV,锌板的电子逸出功为3.34eV,那么对氢原子在能级跃迁的过程中辐射或吸收光子的特征认识正确的是( )
如图为氢原子的能级图,已知可见光的光子的能量范围为1.62~3.11eV,锌板的电子逸出功为3.34eV,那么对氢原子在能级跃迁的过程中辐射或吸收光子的特征认识正确的是( )| A. | 用氢原子从高能级向基态跃迁时发射的光照射锌板,一定能产生光电效应现象 | |
| B. | 用能量为11.0eV的自由电子轰击,可使处于基态的氢原子跃迁到激发态 | |
| C. | 处于n=2能级的氢原子能吸收任意频率的紫外线 | |
| D. | 处于n=3能级的氢原子可以吸收任意频率的紫外线,并且使氢原子电离 |
4.闭合回路的磁能量Φ随时间t变化图象分别如图所示,关于回路中产生的感应电动势的论述,其中不正确的是( )

| A. | 图甲的回路中没有感应电动势 | |
| B. | 图乙的回路中感应电动势恒定不变 | |
| C. | 图丙的回路中0~t1时间内的感应电动势小于t1~t2时间内的感应电动势 | |
| D. | 图丁的回路中感应电动势先变大,再变小 |