题目内容
19.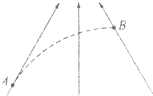 有一簇电场线,电场方向如图所示.一带电粒子仅在电场力作用下,沿图中虚线从A运动到B,则( )
有一簇电场线,电场方向如图所示.一带电粒子仅在电场力作用下,沿图中虚线从A运动到B,则( )| A. | 该粒子带正电 | |
| B. | 该粒子在B点加速度比在A点加速度大 | |
| C. | 该粒子从A运动到B电势能增加 | |
| D. | 该粒子从A运动到B动能增加 |
分析 根据轨迹弯曲的方向可判断出电场力方向,确定电场力做功正负,判断动能、电势能的变化.由电场线的疏密判断场强大小,即可判断电场力和加速度的大小.
解答 解:A、由图看出,带电粒子的轨迹向下弯曲,则知带电粒子所受的电场力方向沿电场线向下,与电场线方向相反,则知粒子带负电,故A错误.
B、从A到B,电场线越来越密,场强越来越大,带电粒子所受的电场力增大,则其加速度增大.故B正确.
CD、若粒子从A运动到B,电场力与速度的夹角为钝角,所以电场力做负功,电势能增加,动能减小,故C正确,D错误.
故选:BC.
点评 本题就是考查学生基础知识的掌握,加强基础知识的学习,掌握住电场线的特点,即可解决本题.

练习册系列答案
 暑假作业海燕出版社系列答案
暑假作业海燕出版社系列答案
相关题目
10. 如图所示,物体A和B的质量均为m,且分别与跨过定滑轮的轻绳连接(不计绳与滑轮、滑轮与轴之间的摩擦)在用水平变力F拉物体B沿水平方向向右做匀速直线运动的过程中,(0°<α<90°)则( )
如图所示,物体A和B的质量均为m,且分别与跨过定滑轮的轻绳连接(不计绳与滑轮、滑轮与轴之间的摩擦)在用水平变力F拉物体B沿水平方向向右做匀速直线运动的过程中,(0°<α<90°)则( )
如图所示,物体A和B的质量均为m,且分别与跨过定滑轮的轻绳连接(不计绳与滑轮、滑轮与轴之间的摩擦)在用水平变力F拉物体B沿水平方向向右做匀速直线运动的过程中,(0°<α<90°)则( )| A. | 物体A也做匀速直线运动 | |
| B. | 绳子拉力始终不一定大于物体A所受重力 | |
| C. | 绳子对物体A的拉力逐渐增大 | |
| D. | 绳子对物体A的拉力逐渐减小 |
7.关于质点的运动,下列说法中正确的是( )
| A. | 某时刻速度为零,则此时刻加速度一定为零 | |
| B. | 加速度越大则速度变化得越快 | |
| C. | 质点做单方向直线运动,其加速度逐渐增大时,其速度可能会逐渐减小 | |
| D. | 做变加速直线运动的物体,在相邻两段相等时间间隔内通过的位移之差一定为恒量 |
14.下面各种情况中,a、b两点的电势相等,电场强度也相同的是( )
| A. | 如图甲,离点电荷等距的a、b两点 | |
| B. | 如图乙,达到静电平衡时导体内部的a、b两点 | |
| C. | 如图丙,带电平行板电容器中,与正极板不等距的a、b两点 | |
| D. | 如图丁,两个等量同种电荷连线的中垂线上,与连线中点O等距的a、b两点 |
4.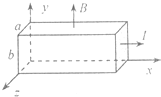 据报道,我国实施的“双星”计划发射的卫星中放置了一种“磁强计”,用于测定地磁场的磁感应强度等研究项目.磁强计的原理如图所示:电路中有一段金属导体,它的横截面积是宽为a、高为b的长方形,放在沿y轴正方向的匀强磁场中,导体中通有沿x正方向、大小为I的电流.已知金属导体单位体积中的自由电子数为n,电子电量为e.金属导电过程中,自由电子做定向移动可视为匀速运动.若测出金属导体前后两个侧面间(z=a为前侧面,z=o为后侧面)的电势差为U,那么( )
据报道,我国实施的“双星”计划发射的卫星中放置了一种“磁强计”,用于测定地磁场的磁感应强度等研究项目.磁强计的原理如图所示:电路中有一段金属导体,它的横截面积是宽为a、高为b的长方形,放在沿y轴正方向的匀强磁场中,导体中通有沿x正方向、大小为I的电流.已知金属导体单位体积中的自由电子数为n,电子电量为e.金属导电过程中,自由电子做定向移动可视为匀速运动.若测出金属导体前后两个侧面间(z=a为前侧面,z=o为后侧面)的电势差为U,那么( )
据报道,我国实施的“双星”计划发射的卫星中放置了一种“磁强计”,用于测定地磁场的磁感应强度等研究项目.磁强计的原理如图所示:电路中有一段金属导体,它的横截面积是宽为a、高为b的长方形,放在沿y轴正方向的匀强磁场中,导体中通有沿x正方向、大小为I的电流.已知金属导体单位体积中的自由电子数为n,电子电量为e.金属导电过程中,自由电子做定向移动可视为匀速运动.若测出金属导体前后两个侧面间(z=a为前侧面,z=o为后侧面)的电势差为U,那么( )| A. | 前侧面电势高,B=$\frac{nebU}{I}$ | B. | 前侧面电势高,B=$\frac{neaU}{I}$ | ||
| C. | 后侧面电势高,B=$\frac{nebU}{I}$ | D. | 后侧面电势高,B=$\frac{neaU}{I}$ |
11.下列说法正确的是( )
| A. | 现代各种复杂精密的机械,都是从古代简单的机械逐步发展而来的 | |
| B. | 机器人是一种高度自动化的机器,它能代替人做一些单调重复而又要求非常精确的操作 | |
| C. | “智能机器人”是现代机器人的一个发展方向 | |
| D. | 机器人将最终代替人类 |
8.如图所示,A1、A2是完全相同的灯泡,线圈L的电阻可以忽略,下列说法中正确的是( )

| A. | 开关S接通时,A2灯先亮、A1灯逐渐亮,最后A1A2一样亮 | |
| B. | 开关S接通时,A1、A2两灯始终一样亮 | |
| C. | 断开S的瞬间,流过A2的电流方向与断开S前电流方向相反 | |
| D. | 断开S的瞬间,流过A1的电流方向与断开S前电流方向相反 |
 如图所示,电子射线管(A为其阴极),放在蹄形磁轶的N、S两极间,射线管的AB两极分别接在直流高压电源的负极和正极.此时,荧光屏上的电子束运动径迹向下偏转.(填“向上”、“向下”“不”).
如图所示,电子射线管(A为其阴极),放在蹄形磁轶的N、S两极间,射线管的AB两极分别接在直流高压电源的负极和正极.此时,荧光屏上的电子束运动径迹向下偏转.(填“向上”、“向下”“不”).