题目内容
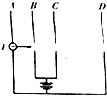
7.有同学利用如图所示的装置来验证力的平行四边形定则.在竖直木板上铺有白纸,固定两个光滑的滑轮A和B,将细绳打一个结点O,每个钩码的重量相等,当系统达到平衡时,根据钩码个数读出三根绳子的拉力TOA、TOB和TOC,回答下列问题:
(1)改变钩码个数,实验能完成的是ABD.
A.钩码的个数N1=N2=N3=4
B.钩码的个数N1=N3=3,N2=4
C.钩码的个数N1=N2=2,N3=4
D.钩码的个数N1=3,N2=4,N3=5
(2)在拆下钩码和绳子前,最重要的一个步骤是C.
A.用量角器量出三段绳子之间的夹角
B.量出OA、OB、OC三段绳子的长度
C.标记结点O的位置,并记录OA、OB、OC三段绳子的方向
D.用天平测出钩码的质量.
分析 (1)两头挂有钩码的细绳跨过两光滑的固定滑轮,另挂有钩码的细绳系于O点(如图所示).由于钩码均相同,则钩码个数就代表力的大小.所以O点受三个力处于平衡状态,由平行四边形定则可知:三角形的三个边为三个力的大小.
(2)为验证平行四边形,必须作图,所以要强调三力平衡的交点、力的大小(钩码的个数)与力的方向;
解答  解:(1)对O点受力分析,OA OB OC分别表示三个力的大小,由于三共点力处于平衡,所以0C等于OD.因此三个力的大小构成一个三角形,即满足两边之和大于第三边,两边之差小于第三边;
解:(1)对O点受力分析,OA OB OC分别表示三个力的大小,由于三共点力处于平衡,所以0C等于OD.因此三个力的大小构成一个三角形,即满足两边之和大于第三边,两边之差小于第三边;
A、以钩码的个数表示力的大小,则三力为边构成等边三角形,故A正确;
B、以钩码的个数表示力的大小,则三力为边构成等腰三角形,故B正确;
C、以钩码的个数表示力的大小,则不能构成三角形,故C错误;
D、以钩码的个数表示力的大小,则三力构成直角三角形,故D正确;
故选:ABD.
(2)为验证平行四边形定则,必须作受力图,所以先明确受力点,即标记结点O的位置,其次要作出力的方向并读出力的大小,最后作出力的图示,因此要做好记录,是从力的三要素角度出发,要记录砝码的个数和记录OA、OB、OC三段绳子的方向,故C正确,ABD错误.
故选:C.
故答案为:(1)ABD;(2)C
点评 掌握三力平衡的条件,理解平行四边形定则,同时验证平行四边形定则是从力的图示角度去作图分析,明确“理论值”和“实际值”的区别.

练习册系列答案
相关题目
17.火箭由地面竖直向上发射,在大气层里加速上升的过程中卫星的( )
| A. | 机械能增加 | B. | 重力势能减少 | C. | 机械能不变 | D. | 动能减少 |
18. 如图是一个理想变压器,K为双向开关,P是滑动变阻器滑动触头,U1为加在原线圈两端电压,I1为原线圈上电流,则( )
如图是一个理想变压器,K为双向开关,P是滑动变阻器滑动触头,U1为加在原线圈两端电压,I1为原线圈上电流,则( )
如图是一个理想变压器,K为双向开关,P是滑动变阻器滑动触头,U1为加在原线圈两端电压,I1为原线圈上电流,则( )| A. | 保持U1及P的位置不变,K由a合向b时,I1将增大 | |
| B. | 保持U1及P的位置不变,K由a合向b时,R消耗的功率减小 | |
| C. | 保持U1不变,K合在a处,使P上滑,I1将增大 | |
| D. | 保持P的位置不变,K合在a处,若U1增大,I1将增大 |
15.如图所示,人用手托着苹果处于静止状态,则( )

| A. | 手所受压力是由于手的弹性形变而产生的 | |
| B. | 手所受压力和手对苹果的支持力是一对平衡力 | |
| C. | 苹果所受重力和手对苹果的支持力是一对平衡力 | |
| D. | 苹果所受重力和苹果对手的压力是作用力和反作用力 |
2. 竖直悬挂的轻弹簧下端连接一个小球,用手托起小球,使弹簧处于压缩状态,如图所示.则迅速放手后( )
竖直悬挂的轻弹簧下端连接一个小球,用手托起小球,使弹簧处于压缩状态,如图所示.则迅速放手后( )
竖直悬挂的轻弹簧下端连接一个小球,用手托起小球,使弹簧处于压缩状态,如图所示.则迅速放手后( )| A. | 小球开始向下做匀加速运动 | |
| B. | 小球的机械能改变量大小始终等于弹簧的弹性势能改变量大小 | |
| C. | 小球运动过程中动能的改变量大小始终等于弹簧的弹性势能改变量大小 | |
| D. | 小球在任一时刻受到的弹力小于小球的重力 |
12. 如图所示,有孔平行金属板A、B、C、D竖直放置,四金属板上的小孔处在同一水平线上,B、C间距与A、B间距相等,C、D间的间距是A、B间的间距的2倍,从A板上的小孔F处无初速释放一个电子向B板方向运动,设电源电动势为E,电子的电荷量为e,不计电子的重力.下列叙述正确的是( )
如图所示,有孔平行金属板A、B、C、D竖直放置,四金属板上的小孔处在同一水平线上,B、C间距与A、B间距相等,C、D间的间距是A、B间的间距的2倍,从A板上的小孔F处无初速释放一个电子向B板方向运动,设电源电动势为E,电子的电荷量为e,不计电子的重力.下列叙述正确的是( )
如图所示,有孔平行金属板A、B、C、D竖直放置,四金属板上的小孔处在同一水平线上,B、C间距与A、B间距相等,C、D间的间距是A、B间的间距的2倍,从A板上的小孔F处无初速释放一个电子向B板方向运动,设电源电动势为E,电子的电荷量为e,不计电子的重力.下列叙述正确的是( )| A. | 电子从B板到达C板动能变化量为零 | B. | 电子到达C板时的动能是2eE | ||
| C. | 电子不能到达D板 | D. | 电子在A板和D板之间做往复运动 |
19.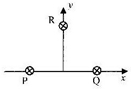 如图所示,三根通电长直导线P、Q、R互相平行,通过正三角形的三个顶点,三根直导线均通入大小相等、方向垂直纸面向里的电流,则R受到的磁场力的方向是( )
如图所示,三根通电长直导线P、Q、R互相平行,通过正三角形的三个顶点,三根直导线均通入大小相等、方向垂直纸面向里的电流,则R受到的磁场力的方向是( )
如图所示,三根通电长直导线P、Q、R互相平行,通过正三角形的三个顶点,三根直导线均通入大小相等、方向垂直纸面向里的电流,则R受到的磁场力的方向是( )| A. | 垂直R,指向y轴负方向 | B. | 垂直R,指向y轴正方向 | ||
| C. | 垂直R,指向x轴正方向 | D. | 垂直R,指向x轴负方向 |
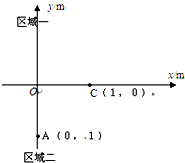 在水平光滑的绝缘平面内建立如图所示的直角坐标系,将第Ⅰ、Ⅱ象限称为区域一,第Ⅲ、Ⅳ象限称为区域二,其中区域二内有匀强电场,区域一内有大小为2×10-2T、方向垂直水平光滑平面的匀强磁场.把一个荷质比为$\frac{q}{m}$=2×108C/kg的正电荷从坐标为(0,-1)的A点处由静止释放,电荷以一定的速度从坐标为(1,0)的C点第一次经x轴进入区域一,经过一段时间,从坐标原点O第二次经x轴回到区域二.不计此电荷受到的重力.
在水平光滑的绝缘平面内建立如图所示的直角坐标系,将第Ⅰ、Ⅱ象限称为区域一,第Ⅲ、Ⅳ象限称为区域二,其中区域二内有匀强电场,区域一内有大小为2×10-2T、方向垂直水平光滑平面的匀强磁场.把一个荷质比为$\frac{q}{m}$=2×108C/kg的正电荷从坐标为(0,-1)的A点处由静止释放,电荷以一定的速度从坐标为(1,0)的C点第一次经x轴进入区域一,经过一段时间,从坐标原点O第二次经x轴回到区域二.不计此电荷受到的重力.