题目内容
13. 如图,一块足够长的木板B放在光滑的水平面上,在B上放一物体A,两物体都静止.现用恒定的外力F拉木板B,由于A、B间摩擦力的作用,物体A将在木板B上滑动,以地面为参照物,A、B都向前移动一段距离,在此过程中 ( )
如图,一块足够长的木板B放在光滑的水平面上,在B上放一物体A,两物体都静止.现用恒定的外力F拉木板B,由于A、B间摩擦力的作用,物体A将在木板B上滑动,以地面为参照物,A、B都向前移动一段距离,在此过程中 ( )| A. | 外力F做的功等于A和B的动能的增量 | |
| B. | A对B摩擦力所做功的绝对值小于B对A摩擦力所做功的绝对值 | |
| C. | B对A的摩擦力所做的功等于A的动能的增量 | |
| D. | 外力F对B做的功等于B的动能的增量与B克服摩擦力所做的功之和 |
分析 分析能量的转化情况,判断外力F做功与总动能增量的关系.选择A与B作为研究对象,运用动能定理研究此过程找出功和能的对应关系.求总功时,要正确受力分析,准确求出每一个力所做的功.
解答 解:A、根据功能关系知,外力F做的功等于A和B的动能的增量与系统产生的内能之和,故A错误.
B、A对B的摩擦力与B对A的摩擦力是一对作用力与反作用力,大小相等,方向相反,但是由于A在B上滑动,A对地的位移比B对地的位移小,所以A对B摩擦力所做功的绝对值大于B对A摩擦力所做功的绝对值.故B错误.
C、对A,运用动能定理知,B对A的摩擦力所做的功等于A的动能的增量,故C正确.
D、对B,运用动能定理知,WF-Wf=△EkB,Wf为B克服摩擦力所做的功,即得WF=△EkB+Wf,就是外力F对B做的功等于B的动能增量与B克服摩擦力所做的功之和,故D正确.
故选:CD
点评 运用动能定理时,研究对象如果是系统,系统的内力做功也要考虑.一般情况下两物体相对静止,系统的内力做功为0.如果两物体有相对位移,那么系统的内力做的总功就不为0了.

练习册系列答案
 激活思维优加课堂系列答案
激活思维优加课堂系列答案 活力试卷系列答案
活力试卷系列答案
相关题目
 如图所示,XOY平面内存在以坐标(0,r)为圆心,半径为r的圆形有界磁场,磁场方向垂直纸面向里,一束电量均为q(q>0),质量均为m的粒子均从原点O以相同的速率v射入磁场,入射方向在XOY平面内分布在Y轴左右两侧各30°范围内,所有粒子从磁场离开时速度方向均平行于X轴,在X=2r处有一平行于Y轴的足够长的荧光屏,不计带电粒子的重力,不考虑粒子间的相互作用,求:
如图所示,XOY平面内存在以坐标(0,r)为圆心,半径为r的圆形有界磁场,磁场方向垂直纸面向里,一束电量均为q(q>0),质量均为m的粒子均从原点O以相同的速率v射入磁场,入射方向在XOY平面内分布在Y轴左右两侧各30°范围内,所有粒子从磁场离开时速度方向均平行于X轴,在X=2r处有一平行于Y轴的足够长的荧光屏,不计带电粒子的重力,不考虑粒子间的相互作用,求:
1.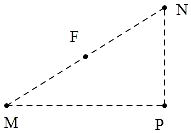 如图所示,在正点电荷Q的电场中有M、N、P、F四点,M、N、P为直角三角形的三个顶点,F为MN的中点,∠M=30°.M、N、P、F四点处的电势分别用φM、φN、φp、φF表示.已知φM=φN,φP=φF,点电荷Q在M、N、P三点所在平面内,则( )
如图所示,在正点电荷Q的电场中有M、N、P、F四点,M、N、P为直角三角形的三个顶点,F为MN的中点,∠M=30°.M、N、P、F四点处的电势分别用φM、φN、φp、φF表示.已知φM=φN,φP=φF,点电荷Q在M、N、P三点所在平面内,则( )
如图所示,在正点电荷Q的电场中有M、N、P、F四点,M、N、P为直角三角形的三个顶点,F为MN的中点,∠M=30°.M、N、P、F四点处的电势分别用φM、φN、φp、φF表示.已知φM=φN,φP=φF,点电荷Q在M、N、P三点所在平面内,则( )| A. | 点电荷Q一定在MP的中点 | |
| B. | φP大于φM | |
| C. | N点的场强比P点的场强大 | |
| D. | 将负试探电荷从P点搬运到N点,电场力做正功 |
8.两个等量同种电荷固定于光滑水平面上,其连线中垂线上有A、B、C三点,如图1所示.一个电量为2C,质量为1kg的带正电粒子从C点静止释放,其运动的v-t图象如图2所示,其中B点处为整条图线切线斜率最大的位置(图中标出了该切线).则下列说法正确的是( )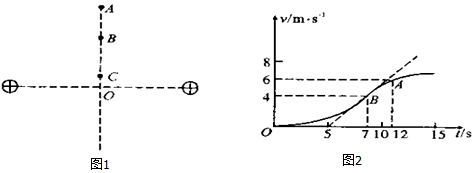
| A. | B点为中垂线上电场强度最大的点,场强E=2V/m | |
| B. | 由C到A的过程中带电粒子所受的电场力先做正功后做负功 | |
| C. | O点是两电荷连线上场强最小的点 | |
| D. | 若在C点释放一电子,则给电子提供合适的初速度,电子可能做匀速圆周运动 |
18. 如图所示是“抓娃娃机”的照片,使用者可凭自己的技术操控机械爪抓住透明箱内的玩具,提升至一定高度后水平移动到出口就可取得玩具,关于这一操作过程,下列说法正确的是( )
如图所示是“抓娃娃机”的照片,使用者可凭自己的技术操控机械爪抓住透明箱内的玩具,提升至一定高度后水平移动到出口就可取得玩具,关于这一操作过程,下列说法正确的是( )
如图所示是“抓娃娃机”的照片,使用者可凭自己的技术操控机械爪抓住透明箱内的玩具,提升至一定高度后水平移动到出口就可取得玩具,关于这一操作过程,下列说法正确的是( )| A. | 机械爪抓到玩具匀速上升时,玩具的机械能守恒 | |
| B. | 玩具从机械爪中掉下,玩具的动能增加,机械能增加 | |
| C. | 机械爪抓到玩具水平匀速移动时,机械爪对玩具不做功 | |
| D. | 机械爪抓到玩具匀速上升时,机械爪做的功等于零 |
5. 弹簧发生形变时,其弹性势能的表达式为Ep=$\frac{1}{2}$kx2,其中k是弹簧的劲度系数,x是形变量.如图所示,一质量为m物体位于一直立的轻弹簧上方h高度处,该物体从静止开始落向弹簧.设弹簧的劲度系数为k,则物块的最大动能为(弹簧形变在弹性限度内)( )
弹簧发生形变时,其弹性势能的表达式为Ep=$\frac{1}{2}$kx2,其中k是弹簧的劲度系数,x是形变量.如图所示,一质量为m物体位于一直立的轻弹簧上方h高度处,该物体从静止开始落向弹簧.设弹簧的劲度系数为k,则物块的最大动能为(弹簧形变在弹性限度内)( )
弹簧发生形变时,其弹性势能的表达式为Ep=$\frac{1}{2}$kx2,其中k是弹簧的劲度系数,x是形变量.如图所示,一质量为m物体位于一直立的轻弹簧上方h高度处,该物体从静止开始落向弹簧.设弹簧的劲度系数为k,则物块的最大动能为(弹簧形变在弹性限度内)( )| A. | mgh+$\frac{{m}^{2}{g}^{2}}{2k}$ | B. | mgh-$\frac{{m}^{2}{g}^{2}}{2k}$ | C. | mgh+$\frac{{m}^{2}{g}^{2}}{k}$ | D. | mgh-$\frac{{m}^{2}{g}^{2}}{k}$ |
2.将质量为m的小球在距地面高度为h处抛出,抛出时的速度大小为v0,小球落到地面时的速度大小为2v0.若小球受到的空气阻力不能忽略,重力加速度为g,则对于小球下落的整个过程,下列说法中正确的是( )
| A. | 小球克服空气阻力做的功等于mgh | B. | 重力对小球做的功等于$\frac{3}{2}$mv02 | ||
| C. | 合外力对小球做的功等于$\frac{3}{2}$mv02 | D. | 小球重力势能增加了mgh |