题目内容
8.气垫导轨上相隔一定距离的两处安装两个光电传感器A、B,滑块P上固定一遮光条,若光线被遮光条遮挡,光电传感器会输出高电压,两光电传感器采集数据后与计算机相连.滑块在细线的牵引下向左加速运动,遮光条经过光电传感器A、B时,通过计算机可以得到如图乙所示的电压U随时间t变化的图象.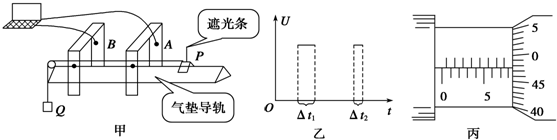
(1)实验前,按通气源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,当图乙中的△t1=△t2(选填“>”、“=”或“<”)时,说明气垫导轨已经水平.用螺旋测微器测遮光条宽度d,测量结果如图丙所示,则d=8.474mm.
(2)将滑块P用细线跨过气垫导轨左端的定滑轮与质量为m的钩码Q相连,将滑块P由图甲所示位置释放,通过计算机得到的图象如图乙所示,若△t1、△t2、m和d已知,要验证滑块和钩码组成的系统机械能是否守恒,还应测出滑块质量M和两光电门间的距离L(写出物理量的名称及符号).
(3)若上述物理量间满足关系式mgL=$\frac{1}{2}$(m+M)($\frac{d}{{△t}_{2}}$)2-$\frac{1}{2}$(m+M)($\frac{d}{{△t}_{1}}$)2,则表明在上述过程中,滑块和钩码组成的系统机械能守恒.(重力加速度为g)
(4)在对数据进行处理时,发现关系式两边结果并不严格相等,其原因可能是受到了阻力的作用.(写出一种即可)
分析 (1)如果遮光条通过光电门的时间相等,说明遮光条做匀速运动,即说明气垫导轨已经水平.螺旋测微器的读数方法是固定刻度读数加上可动刻度读数,在读可动刻度读数时需估读.
(2)要验证滑块和砝码组成的系统机械能是否守恒,就应该去求出动能的增加量和重力势能的减小量,根据这两个量求解.
(3)滑块和砝码组成的系统机械能守恒列出关系式.
(4)分析下落过程中的受力情况,则可得出误差的形成原因.
解答 解:(1)如果遮光条通过光电门的时间相等,说明遮光条做匀速运动,即说明气垫导轨已经水平.
螺旋测微器的固定刻度读数为8mm,可动刻度读数为0.01×47.4mm=0.474mm,所以最终读数为:8mm+0.474mm=8.474mm.
(2)要验证滑块和砝码组成的系统机械能是否守恒,就应该去求出动能的增加量和重力势能的减小量,
光电门测量瞬时速度是实验中常用的方法.由于光电门的宽度很小,所以我们用很短时间内的平均速度代替瞬时速度.
vB=$\frac{d}{{△t}_{2}}$,vA=$\frac{d}{{△t}_{1}}$
滑块和砝码组成的系统动能的增加量为:△Ek=$\frac{1}{2}$(m+M)($\frac{d}{{△t}_{2}}$)2-$\frac{1}{2}$(m+M)($\frac{d}{{△t}_{1}}$)2.
滑块和砝码组成的系统动能的重力势能的减小量为:△Ep=mgL
所以还应测出滑块质量M,两光电门间距离L.
(3)如果系统动能的增加量等于系统重力势能的减小量,那么滑块和砝码组成的系统机械能守恒.即:
mgL=$\frac{1}{2}$(m+M)($\frac{d}{{△t}_{2}}$)2-$\frac{1}{2}$(m+M)($\frac{d}{{△t}_{1}}$)2
(4)由于重物在下落过程中受到了空气阻力及纸带与传送带之间的摩擦力等阻力作用,使重力势能的减小量大于动能的增加量;
故答案为:(1)=,8.476(在8.475-8.477之间均算对)
(2)滑块质量M,两光电门间的距离L
(3)mgL=$\frac{1}{2}$(m+M)($\frac{d}{{△t}_{2}}$)2-$\frac{1}{2}$(m+M)($\frac{d}{{△t}_{1}}$)2
(4)受到了阻力作用.
点评 掌握螺旋测微器的读数方法.了解光电门测量瞬时速度的原理.实验中我们要清楚研究对象和研究过程,对于系统我们要考虑全面.

 云南师大附小一线名师提优作业系列答案
云南师大附小一线名师提优作业系列答案| A. | E=$\frac{F}{q}$适用于任何电场 | |
| B. | E=k$\frac{Q}{{r}^{2}}$适用于真空中点电荷形成的电场 | |
| C. | E=$\frac{U}{d}$适用于匀强电场 | |
| D. | E是矢量,由U=Ed可知,U也是矢量 |
| A. | 将它们的距离变为原来的一半 | |
| B. | 将它们的带电量变为原来的一半 | |
| C. | 将它们的距离变为$\sqrt{2}r$ | |
| D. | 将它们的电量和距离均变为原来的2倍 |
 两段长度相等的轻杆通过质量为m的小球A连接在一直线上,质量为2m的小球B固定在一根杆的一端,如图所示.当整个装置在光滑的水平面上绕另一杆的端点O匀速转动时,OA杆的拉力F1与AB杆的拉力F2之比为( )
两段长度相等的轻杆通过质量为m的小球A连接在一直线上,质量为2m的小球B固定在一根杆的一端,如图所示.当整个装置在光滑的水平面上绕另一杆的端点O匀速转动时,OA杆的拉力F1与AB杆的拉力F2之比为( )| A. | 5:4 | B. | 4:5 | C. | 1:4 | D. | 4:1 |
| A. | 亚里士多德认为轻重不同物体下落快慢不同 | |
| B. | 牛顿提出了三个运动定律及万有引力定律,并利用扭秤装置较准确地测出了引力常量 | |
| C. | 伽利略认为自由落体运动一定是最简单的变速运动,它的速度变化应该是均匀的 | |
| D. | 开普勒研究了丹麦天文学家第谷的行星观测记录,发现了行星运动三定律 |
 如图A、B两物体用一根跨过定滑轮的细绳相连,置于固定斜面体的两个斜面上的相同高度,处于静止状态,两斜面的倾角分别为53°和37°,若不计摩擦,剪断细绳后下列说法中正确的是( )
如图A、B两物体用一根跨过定滑轮的细绳相连,置于固定斜面体的两个斜面上的相同高度,处于静止状态,两斜面的倾角分别为53°和37°,若不计摩擦,剪断细绳后下列说法中正确的是( )| A. | 两物体着地时的速度大小一定相同 | |
| B. | 两物体开始下滑到着地的时间一定相同 | |
| C. | 两物体着地时的动能一定相同 | |
| D. | 两物体着地时所受重力的功率一定相同 |
 请如图所示,一探险队员重G1=800N,通过三段轻绳从左侧崖顶匀速下移到谷底,三段轻绳的结点为O,轻绳OB水平且B端与放置在崖顶水平面上重为G2的巨石相连,巨石与地面间的摩擦因数μ=0.2,轻绳OA固定在右侧悬崖的树上,绳与竖直方向夹角θ=37°,巨石处于静止状态,取sin37°=0.6,cos37°=0.8,求:
请如图所示,一探险队员重G1=800N,通过三段轻绳从左侧崖顶匀速下移到谷底,三段轻绳的结点为O,轻绳OB水平且B端与放置在崖顶水平面上重为G2的巨石相连,巨石与地面间的摩擦因数μ=0.2,轻绳OA固定在右侧悬崖的树上,绳与竖直方向夹角θ=37°,巨石处于静止状态,取sin37°=0.6,cos37°=0.8,求:| A. | 火星和地球的质量之比 | B. | 火星和太阳的质量之比 | ||
| C. | 火星和地球绕太阳运行速度之比 | D. | 火星和地球到太阳中心的距离之比 |