题目内容
2. 2015年12月10日.百度宣布,其无人驾驶汽车已完成国内首次城市.环境及路况下的全自动驾驶.
2015年12月10日.百度宣布,其无人驾驶汽车已完成国内首次城市.环境及路况下的全自动驾驶.(1)如图所示,无人驾驶汽车车头装有一个激光雷达,就像车的“鼻子”,随时“嗅”着前方80m范围内车辆和行人的“气息”无人驾驶汽车在某路段刹车时的加速度为3.6m/s2,为不撞上前方静止的障碍物,汽车该路段匀速行驶时的最大速度是多少?
(2)若一辆有人驾驶的汽车在该无人驾驶汽车后30m处.两车都以20m/s的速度行驶,前方无人驾驶汽车以3.6m/s2的加速度刹车1.4s后,后方汽车驾驶员立即以5.0m/s2的速度刹车,试通过计算判断两车在运动过程中是否会发生追尾事故?
分析 (1)汽车刹车,做匀减速直线运动,根据速度位移公式列式求解初速度;
(2)考虑从开始到速度相等过程的位移大小关系,该过程无人汽车做匀减速直线运动,有人汽车先做匀速直线运动,后坐匀减速直线运动.
解答 解:(1)无人驾驶汽车刹车,根据速度位移公式,有:
${v}^{2}-{v}_{0}^{2}=2ax$
故$v_0^{\;}=\sqrt{{v^2}-2ax}=\sqrt{0+2×(-3.6)×80}=24m/s$
(2)设从开始经过t时间两车速度相等,则:
v0+a有人(t-△t)=v0+a无人t
解得:
$t=\frac{{{a_{有人}}△t}}{{{a_{有人}}-{a_{无人}}}}=\frac{5×1.4}{5-3.6}=5s$
5s内,有人汽车的位移:
x有人=v0△t+v0(t-△t)+$\frac{1}{2}{a}_{有人}(t-△t)^{2}$=20×1.4+20×(5-1.4)-$\frac{1}{2}×5×(5-1.4)^{2}$=67.6m${x_{无人}}={v_0}t+\frac{1}{2}{a_{有人}}{t^2}=20×5+\frac{1}{2}×(-3.6)×{5^2}=55m$
故△x=67.6m-55m=12.6m<30m,故不会相撞;
答:
(1)无人汽车该路段匀速行驶时的最大速度是24m/s;
(2)两车在运动过程中不会发生追尾事故.
点评 本题关键是明确车的运动性质,灵活选择运动学公式列式求解,第二问是追赶问题,能否追上的临界情况是看速度相等的相对位置情况,不难.

练习册系列答案
相关题目
 如图所示,一根长度为l的橡皮绳,手持其上端,若在其下端拴上一个小重球后静止不动,橡皮绳的长度将变为nl;若用手转动.使小球在水平面内做匀速圆周运动,橡皮绳的长度将变为L,则此球做圆周运动的角速度为多少?
如图所示,一根长度为l的橡皮绳,手持其上端,若在其下端拴上一个小重球后静止不动,橡皮绳的长度将变为nl;若用手转动.使小球在水平面内做匀速圆周运动,橡皮绳的长度将变为L,则此球做圆周运动的角速度为多少?
10.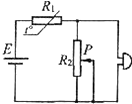 如图所示的火警报警装置,R1为热敏电阻,若温度升高,则R1的阻值会急剧减小,从而引起电铃电压的增加,当电铃电压达到一定值时,电铃会响.下列说法正确的是( )
如图所示的火警报警装置,R1为热敏电阻,若温度升高,则R1的阻值会急剧减小,从而引起电铃电压的增加,当电铃电压达到一定值时,电铃会响.下列说法正确的是( )
如图所示的火警报警装置,R1为热敏电阻,若温度升高,则R1的阻值会急剧减小,从而引起电铃电压的增加,当电铃电压达到一定值时,电铃会响.下列说法正确的是( )| A. | 要使报警的临界温度升高,可以适当增大电源的电动势 | |
| B. | 要使报警的临界温度降低,可以适当增大电源的电动势 | |
| C. | 要使报警的临界温度升高,可以把R2的滑片P适当向下移 | |
| D. | 要使报警的临界温度降低,可以把R2的滑片P适当向下移 |
17. 在地球赤道上进行实验时,用磁传感器测得赤道上P点地磁场磁感应强度大小为B0.将一条形磁铁固定在P点附近的水平面上,让N极指向正北方向,如图所示,此时用磁传感器测得P点的磁感应强度大小为B1;现将条形磁铁以P点为轴旋转90°,使其N极指向正东方向,此时用磁传感器测得P点的磁感应强度的大小应为(可认为地磁南、北极与地理北、南极重合)( )
在地球赤道上进行实验时,用磁传感器测得赤道上P点地磁场磁感应强度大小为B0.将一条形磁铁固定在P点附近的水平面上,让N极指向正北方向,如图所示,此时用磁传感器测得P点的磁感应强度大小为B1;现将条形磁铁以P点为轴旋转90°,使其N极指向正东方向,此时用磁传感器测得P点的磁感应强度的大小应为(可认为地磁南、北极与地理北、南极重合)( )
在地球赤道上进行实验时,用磁传感器测得赤道上P点地磁场磁感应强度大小为B0.将一条形磁铁固定在P点附近的水平面上,让N极指向正北方向,如图所示,此时用磁传感器测得P点的磁感应强度大小为B1;现将条形磁铁以P点为轴旋转90°,使其N极指向正东方向,此时用磁传感器测得P点的磁感应强度的大小应为(可认为地磁南、北极与地理北、南极重合)( )| A. | B1-B0 | B. | B1+B0 | ||
| C. | $\sqrt{{B_0}^2+{B_1}^2}$ | D. | $\sqrt{2{B_0}^2+{B_1}^2-2{B_0}{B_1}}$ |
7.在射箭比赛中,如图所示,运动员右手向后拉弓弦的过程中,她对弓弦的做功情况是( )

| A. | 一直做正功 | B. | 一直做负功 | ||
| C. | 先做正功,后做负功 | D. | 先做负功,后做正功 |
14. 如图所示分别为汽车a和汽车b的v-t图象,汽车a以30m/s的速度行驶在高速公路上,突然发现正前方有一辆汽车b正以10m/s的速度同方向匀速行驶,汽车a紧急刹车,但刹车过程中刹车失灵.已知汽车a刚刹车时与汽车b相距40m,并开始计时,以下说法正确的是( )
如图所示分别为汽车a和汽车b的v-t图象,汽车a以30m/s的速度行驶在高速公路上,突然发现正前方有一辆汽车b正以10m/s的速度同方向匀速行驶,汽车a紧急刹车,但刹车过程中刹车失灵.已知汽车a刚刹车时与汽车b相距40m,并开始计时,以下说法正确的是( )
如图所示分别为汽车a和汽车b的v-t图象,汽车a以30m/s的速度行驶在高速公路上,突然发现正前方有一辆汽车b正以10m/s的速度同方向匀速行驶,汽车a紧急刹车,但刹车过程中刹车失灵.已知汽车a刚刹车时与汽车b相距40m,并开始计时,以下说法正确的是( )| A. | 由于初始距离太近,即使刹车不失灵也会追尾 | |
| B. | 在t=1s时,两车相距15米 | |
| C. | 在t=5s时追尾 | |
| D. | 两车不会追尾,最近距离为5米 |