题目内容
20.下列说法正确的是( )| A. | 机械波的振幅与波源无关 | |
| B. | 机械波的传播速度仅由介质本身的性质决定 | |
| C. | 机械波从一种介质进入另一种介质,频率可能会发生变化 | |
| D. | 机械波的传播方向和振动方向一定垂直 |
分析 机械波传播过程是传播波源的振动形式和能量的过程,振动质点并不随波一起传播,质点在自己平衡位置振动,因此要明确波的形成.机械波的振幅等于波源的振幅,机械波的传播速度由介质决定;机械波从一种介质进入另一种介质,传播速度和波长会发生变化,但频率不变化.只有横波传播方向和振动方向一定垂直.
解答 解:A、机械波在介质的传播特点是波源的振动带动相邻质点做受迫振动,所以机械波的振幅等于波源的振幅,故A错误;
B、机械波的传播速度由介质决定,与波源无关,故B正确;
C、机械波从一种介质进入另一种介质中,传播速度会发生变化,由机械波的形成原因可知频率不变,C错误;
D、在纵波中质点的振动方向和波的传播方向相同或相反,并不垂直.只有横波传播方向和振动方向一定垂直,故D错误;
故选:B.
点评 考查了机械波有关基础知识,解题关键明确机械波的产生条件、传播特点,注意区分横波和纵波,在纵波中质点的振动方向和波的传播方向相同或相反,并不垂直.由于教材3-4做题遇到的大部分是横波,因此很容易让人误认为机械波的传播方向和振动方向一定垂直.

练习册系列答案
 同步练习河南大学出版社系列答案
同步练习河南大学出版社系列答案 同步练习西南大学出版社系列答案
同步练习西南大学出版社系列答案 补充习题江苏系列答案
补充习题江苏系列答案 学练快车道口算心算速算天天练系列答案
学练快车道口算心算速算天天练系列答案
相关题目
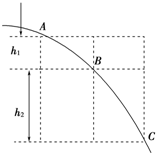 一个同学在“研究平抛物体运动”实验中,只画出了如图所示的一部分曲线,于是他在曲线上取水平距离△s相等的三点A、B、C,量得△s=0.2m.又量出它们之间的竖直距离分别为h1=0.1m,h2=0.2m,利用这些数据,可求得:
一个同学在“研究平抛物体运动”实验中,只画出了如图所示的一部分曲线,于是他在曲线上取水平距离△s相等的三点A、B、C,量得△s=0.2m.又量出它们之间的竖直距离分别为h1=0.1m,h2=0.2m,利用这些数据,可求得:
11.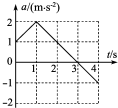 某同学在开展研究性学习的过程中,利用加速度传感器研究某一物体以初速度2m/s做直线运动的加速度a随时间t变化的规律,并在计算机上得到了前4s内物体加速度随时间变化的关系图象,如图所示.以物体的初速度方向为正方向.则下列说法正确的是( )
某同学在开展研究性学习的过程中,利用加速度传感器研究某一物体以初速度2m/s做直线运动的加速度a随时间t变化的规律,并在计算机上得到了前4s内物体加速度随时间变化的关系图象,如图所示.以物体的初速度方向为正方向.则下列说法正确的是( )
某同学在开展研究性学习的过程中,利用加速度传感器研究某一物体以初速度2m/s做直线运动的加速度a随时间t变化的规律,并在计算机上得到了前4s内物体加速度随时间变化的关系图象,如图所示.以物体的初速度方向为正方向.则下列说法正确的是( )| A. | 物体在1 s末速度方向改变 | |
| B. | 物体在3 s末速度方向改变 | |
| C. | 前4 s内物体的最大速度出现在第3 s末,大小为3.5 m/s | |
| D. | 物体在第2 s末与第4 s末的速度大小相等,方向也相同 |
8.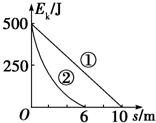 构建和谐、节约型社会的思想深得民心,也体现在生活的方方面面.自动充电式电动车就是很好的一例:将电动车的前轮装有发电机,发电机与蓄电池连接,当电动车滑行时,就可以向蓄电池充电,将其他形式的能转化成电能储存起来.现有某人骑车以500J的初动能在粗糙的水平路面上滑行,第一次关闭充电装置,让车自由滑行,其动能随位移的变化关系如图线①所示;第二次启动充电装置.其动能随位移的变化关系如图线②所示,则( )
构建和谐、节约型社会的思想深得民心,也体现在生活的方方面面.自动充电式电动车就是很好的一例:将电动车的前轮装有发电机,发电机与蓄电池连接,当电动车滑行时,就可以向蓄电池充电,将其他形式的能转化成电能储存起来.现有某人骑车以500J的初动能在粗糙的水平路面上滑行,第一次关闭充电装置,让车自由滑行,其动能随位移的变化关系如图线①所示;第二次启动充电装置.其动能随位移的变化关系如图线②所示,则( )
构建和谐、节约型社会的思想深得民心,也体现在生活的方方面面.自动充电式电动车就是很好的一例:将电动车的前轮装有发电机,发电机与蓄电池连接,当电动车滑行时,就可以向蓄电池充电,将其他形式的能转化成电能储存起来.现有某人骑车以500J的初动能在粗糙的水平路面上滑行,第一次关闭充电装置,让车自由滑行,其动能随位移的变化关系如图线①所示;第二次启动充电装置.其动能随位移的变化关系如图线②所示,则( )| A. | 电动车受到的摩擦阻力为83N | |
| B. | 电动车受到的摩擦阻力为50N | |
| C. | 第二次启动充电装置,向蓄电池所充的电能是300J | |
| D. | 第二次启动充电装置,向蓄电池所充的电能是200J |
15.一质点做简谐运动,其位移x与时间t的关系曲线如图所示,由图可知( )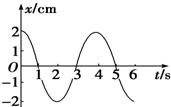
| A. | 质点振动频率是4 Hz | B. | t=2 s时,质点的加速度最大 | ||
| C. | t=2 s时,质点的振幅为-2 cm | D. | t=3 s时,质点所受的合外力最大 |
12.一束单色光由空气射入玻璃,这束光的( )
| A. | 速度变慢,波长变短 | B. | 速度不变,波长变短 | ||
| C. | 周期变小,波长变长 | D. | 周期不变,波长变长 |
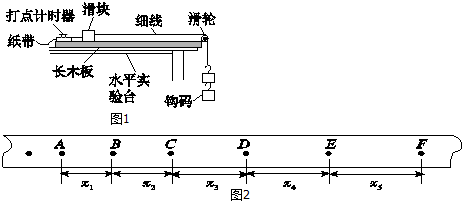
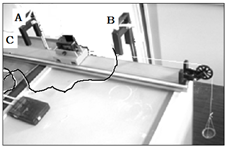
9.某实验小组利用无线力传感器和光电门传感器探究“动能定理”.将无线力传感器和挡光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物G相连,无线力传感器记录小车受到拉力的大小.在水平轨道上A、B两点各固定一个光电门传感器,用于测量小车的速度v1和v2,如图所示.在小车上放置砝码来改变小车质量,用不同的重物G来改变拉力的大小.
实验主要步骤如下:
(1)测量小车和拉力传感器的总质量M1.正确连接所需电路.调节导轨两端的旋钮改变导轨的倾斜度,用以平衡小车的摩擦力,使小车正好做匀速运动.
(2)把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L;
(3)改变小车的质量或重物的质量,重复(2)的操作.
(4)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600J,W3=0.610J(结果保留三位有效数字).
| 次数 | M/kg | |v22-v12|/(m2/s-2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E2 | 1.22 | W2 |
(1)测量小车和拉力传感器的总质量M1.正确连接所需电路.调节导轨两端的旋钮改变导轨的倾斜度,用以平衡小车的摩擦力,使小车正好做匀速运动.
(2)把细线的一端固定在力传感器上,另一端通过定滑轮与重物G相连;将小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力传感器测量拉力的数据以外,还应该记录的物理量为两光电门间的距离L;
(3)改变小车的质量或重物的质量,重复(2)的操作.
(4)表格中M是M1与小车中砝码质量之和,△E为动能变化量,F是拉力传感器的拉力,W是F在A、B间所做的功.表中的△E3=0.600J,W3=0.610J(结果保留三位有效数字).
10.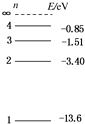 如图所示为氢原子的能级示意图.一个处于n=4能级状态的氢原子,在回到基态的过程中,下列说法正确的是( )
如图所示为氢原子的能级示意图.一个处于n=4能级状态的氢原子,在回到基态的过程中,下列说法正确的是( )
如图所示为氢原子的能级示意图.一个处于n=4能级状态的氢原子,在回到基态的过程中,下列说法正确的是( )| A. | 氢原子只有一种频率的光子放出 | B. | 氢原子放出六种不同波长的光子 | ||
| C. | 氢原子要吸收六种不同波长的光子 | D. | 氢原子最多放出三种频率的光子 |