题目内容
3.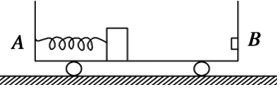 如图所示,光滑水平面上有一小车,小车上有一物体,用一细线将物体系于小车的A端,物体与小车A端之间有一压缩的弹簧,某时刻线断了,物体沿车滑动到B端粘在B端的油泥上.则下述说法中正确的是( )
如图所示,光滑水平面上有一小车,小车上有一物体,用一细线将物体系于小车的A端,物体与小车A端之间有一压缩的弹簧,某时刻线断了,物体沿车滑动到B端粘在B端的油泥上.则下述说法中正确的是( )| A. | 若物体滑动中不受摩擦力,则系统全过程机械能守恒 | |
| B. | 若物体滑动中有摩擦力,则系统全过程动量守恒 | |
| C. | 小车的最终速度与断线前相同 | |
| D. | 全过程系统的机械能不守恒 |
分析 物体与橡皮泥粘合的过程,系统机械能有损失,分析系统的合外力,即可判断动量是否守恒,根据动量守恒定律求解小车的速度.根据动量守恒定律与功能关系判断系统的机械能的变化.
解答 解:AD、物体与橡皮泥粘合的过程,发生非弹性碰撞,系统机械能有损失,所以全过程系统的机械能不守恒.故A错误,D正确.
B、取小车、物体和弹簧为一个系统,则系统水平方向不受外力(若物体在滑动有摩擦力,为系统的内力),全过程系统的动量守恒.故B正确.
C、取系统的初速度方向为正方向,根据动量守恒定律可知,物体沿车滑动到B端粘在B端的油泥上后系统共同的速度与初速度是相同的.故C正确.
故选:BCD
点评 本题根据动量守恒和机械能守恒的条件进行判断:动量守恒的条件是系统不受外力或受到的外力的合力为零;机械能守恒的条件是除重力和弹力外的其余力不做功.

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目
 如图所示,光滑的定滑轮上绕有轻质柔软细线,线的一端系一质量为2m的重物,另一端系一质量为m、电阻为R的金属杆.在倾斜平面内有间距为L的足够长的平行金属导轨PQ、EF,导轨平面与水平面夹角θ=30°,在QF之间连接有阻值也为R的电阻,其余电阻不计,磁感应强度为B0的匀强磁场与导轨平面垂直,开始时金属杆置于导轨下端QF处,将重物由静止释放,当重物下降h时恰好达到稳定速度而匀速下降.运动过程中金属杆始终与导轨垂直且接触良好,不计一切摩擦和接触电阻,重力加速度为g.求:
如图所示,光滑的定滑轮上绕有轻质柔软细线,线的一端系一质量为2m的重物,另一端系一质量为m、电阻为R的金属杆.在倾斜平面内有间距为L的足够长的平行金属导轨PQ、EF,导轨平面与水平面夹角θ=30°,在QF之间连接有阻值也为R的电阻,其余电阻不计,磁感应强度为B0的匀强磁场与导轨平面垂直,开始时金属杆置于导轨下端QF处,将重物由静止释放,当重物下降h时恰好达到稳定速度而匀速下降.运动过程中金属杆始终与导轨垂直且接触良好,不计一切摩擦和接触电阻,重力加速度为g.求:
14.某原子从M能级跃迁到N能级,需要吸收一个能量为E1的光子,从M能级跃迁到P能级,需要吸收一个能量为E2的光子,且有E1>E2,则原子从N能级跃迁到P能级( )
| A. | 放出一个能量为E1-E2的光子 | B. | 放出一个能量为E1+E2的光子 | ||
| C. | 需要吸收一个能量为E1-E2的光子 | D. | 需要吸收一个能量为E1+E2的光子 |
11.质量为m的物体,在距地面h高处以$\frac{2g}{3}$的加速度由静止竖直下落到地面.下列说法中正确的是( )
| A. | 物体的重力势能减少$\frac{1}{3}mgh$ | B. | 物体的动能增加$\frac{1}{3}mgh$ | ||
| C. | 物体的机械能减少$\frac{1}{3}mgh$ | D. | 重力做功$\frac{1}{3}mgh$ |
18.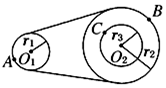 如图所示的传动装置中,B、C两轮固定在一起绕同一轴转动,A、B两轮用皮带传动,三个轮的半径关系是r1:r2:r3=1:3:2.若皮带不打滑,则A、B、C三轮边缘上A、B、C三点的( )
如图所示的传动装置中,B、C两轮固定在一起绕同一轴转动,A、B两轮用皮带传动,三个轮的半径关系是r1:r2:r3=1:3:2.若皮带不打滑,则A、B、C三轮边缘上A、B、C三点的( )
如图所示的传动装置中,B、C两轮固定在一起绕同一轴转动,A、B两轮用皮带传动,三个轮的半径关系是r1:r2:r3=1:3:2.若皮带不打滑,则A、B、C三轮边缘上A、B、C三点的( )| A. | 线速度之比vA:vB:vC=3:1:1 | B. | 线速度之比vA:vB:vC=3:3:2 | ||
| C. | 角速度之比ωA:ωB:ωC=3:2:1 | D. | 角速度之比ωA:ωB:ωC=3:3:2 |
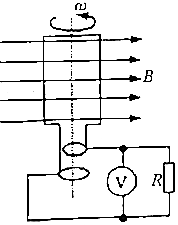 如图所示,交流发电机线圈共n=100匝,每匝线圈所围面积为S=0.01m2,匀强磁场的磁感应强度为B=0.5T,线圈绕与磁感线垂直的转轴匀速转动的角速度为ω=100$\sqrt{2}$rad/s,线圈总电阻为r=1Ω,外电路电阻为R=4Ω.求:
如图所示,交流发电机线圈共n=100匝,每匝线圈所围面积为S=0.01m2,匀强磁场的磁感应强度为B=0.5T,线圈绕与磁感线垂直的转轴匀速转动的角速度为ω=100$\sqrt{2}$rad/s,线圈总电阻为r=1Ω,外电路电阻为R=4Ω.求:
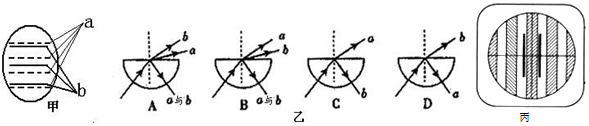
15.在DIS中,光电门测量的是运动物体挡光时间内的平均速度,因为挡光片较窄,所以可看作测量的是瞬时速度.为了测量匀变速直线运动小车的加速度,将宽度均为b的挡光片A、B固定在小车上,如图甲所示.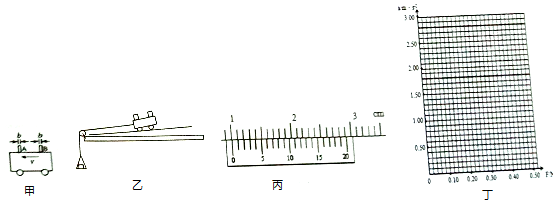
(1)当小车匀变速经过光电门时,测得A、B先后挡光的时间分别为△t1和△t2,A、B开始挡光时刻的间隔为t,则小车的加速度a=$\frac{b}{t}(\frac{1}{△{t}_{2}}-\frac{1}{△{t}_{1}})$.
(2)某同学利用DIS(由加速度传感器、数据采集器、计算机组成)验证牛顿第二定律实验装置如图乙所示.
①用游标卡尺测出挡光片的宽度,由丙图可读出挡光片的宽度b=1.015cm.
②按乙图中所示安装好实验装置,改变砝码盘中砝码质量,测出不同合外力情况下的小车的加速度,记录多组数据如下表,根据表中的数据画出a-F的关系图象.
③观察如图丁图线不是(选填“是”或“不是”)过坐标原点.造成此结果的主要原因是B(选正确答案标号).
A.所用小车质量太大
B.计算合外力F时没有计入砝码盘的重力
C.导轨保持了水平状态
D.所挂钩码质量过大.
(1)当小车匀变速经过光电门时,测得A、B先后挡光的时间分别为△t1和△t2,A、B开始挡光时刻的间隔为t,则小车的加速度a=$\frac{b}{t}(\frac{1}{△{t}_{2}}-\frac{1}{△{t}_{1}})$.
(2)某同学利用DIS(由加速度传感器、数据采集器、计算机组成)验证牛顿第二定律实验装置如图乙所示.
①用游标卡尺测出挡光片的宽度,由丙图可读出挡光片的宽度b=1.015cm.
②按乙图中所示安装好实验装置,改变砝码盘中砝码质量,测出不同合外力情况下的小车的加速度,记录多组数据如下表,根据表中的数据画出a-F的关系图象.
| 次数 | 1 | 2 | 3 | 4 | 5 |
| 合外力 | 0.10 | 0.20 | 0.29 | 0.39 | 0.49 |
| 加速度a(m/s2) | 0.88 | 1.44 | 1.48 | 2.38 | 2.89 |
A.所用小车质量太大
B.计算合外力F时没有计入砝码盘的重力
C.导轨保持了水平状态
D.所挂钩码质量过大.