题目内容
19.我国研制的北斗导航系统又被称为“双星定位系统”,计划到2020年完全建成.系统由5颗地球同步轨道和30颗地球非同步轨道卫星组网而成.2012年12月27日,北斗导航系统正式投入运营.这些卫星的运动均可看作匀速圆周运动,以下说法正确的是( )| A. | 北斗导航系统中地球同步轨道的卫星可以定位在枣庄八中北校正上方 | |
| B. | 北斗导航系统中卫星的运行速度可以大于7.9km/s | |
| C. | 地球同步轨道卫星的周期和月亮绕地球的周期相同 | |
| D. | 北斗导航系统中离地球越近的卫星线速度越大 |
分析 根据万有引力提供向心力G$\frac{mM}{{r}^{2}}$=ma=m$\frac{{v}^{2}}{r}$=mr$\frac{4{π}^{2}}{{T}^{2}}$列式分析.
解答 解:A、同步轨道卫星轨道只能在赤道上空,故A错误;
B、根据v=$\sqrt{\frac{GM}{r}}$ 可知,轨道半径越小则线速度越大,轨道最小对应的速度为第一宇宙速度7.9km/s,故B错误;
C、地球同步卫星是与地球自转同步,不是与月于绕地球的周期,故C错误;
D、根据v=$\sqrt{\frac{GM}{r}}$ 可知,离地球越近的卫星轨道半径越小,故线速度越大,D正确.
故选:D.
点评 同步卫星的轨道与地球赤道共面,万有引力提供圆周运动的向心力,由此展开讨论.

练习册系列答案
 一线名师权威作业本系列答案
一线名师权威作业本系列答案
相关题目
9.汽车驶向一凸形桥,为了在通过桥顶时,减小汽车对桥的压力,司机应( )
| A. | 以尽可能小的速度通过桥顶 | B. | 适当增大速度通过桥顶 | ||
| C. | 以任何速度匀速通过桥顶 | D. | 使通过桥顶的向心加速度尽可能小 |
10.物体初速度为v0,以加速度a做匀加速直线运动.如果要使速度增大到nv0,则经过的位移为( )
| A. | $\frac{{{v}_{0}}^{2}}{2a}$ | B. | $\frac{{{v}_{0}}^{2}}{2a}$(n-1) | C. | $\frac{{{v}_{0}}^{2}}{2a}$(n2-1) | D. | $\frac{{{v}_{0}}^{2}}{2a}$(n-1)2 |
7. 如图所示,有A、B两颗行星绕同一颗恒星M做匀速圆周运动,旋转方向相同,A行星的周期为T1,B行星的周期为T2,在某一时刻两行星相距最近,则( )
如图所示,有A、B两颗行星绕同一颗恒星M做匀速圆周运动,旋转方向相同,A行星的周期为T1,B行星的周期为T2,在某一时刻两行星相距最近,则( )
如图所示,有A、B两颗行星绕同一颗恒星M做匀速圆周运动,旋转方向相同,A行星的周期为T1,B行星的周期为T2,在某一时刻两行星相距最近,则( )| A. | 经过时间t=T1+T2,两行星再次相距最近 | |
| B. | 经过时间t=$\frac{{T}_{1}{T}_{2}}{{T}_{2}-{T}_{1}}$,两行星再次相距最近 | |
| C. | 经过时间t=$\frac{{T}_{1}{T}_{2}}{{T}_{2}-{T}_{1}}$,两行星相距最远经 | |
| D. | 经过时间t=$\frac{{T}_{1}+{T}_{2}}{2}$,两行星相距最远 |
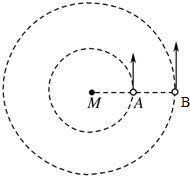
14. 我国已于2011年11月3日成功实现“神舟八号”飞船与“天宫一号”对接.某同学得知上述消息后,画出“天宫一号”和“神舟八号”对接前在各自轨道上绕地球做匀速圆周运动的假想图如下,A代表“天宫一号”,B代表“神舟八号”,虚线为各自的轨道.由此假想图,可以判定( )
我国已于2011年11月3日成功实现“神舟八号”飞船与“天宫一号”对接.某同学得知上述消息后,画出“天宫一号”和“神舟八号”对接前在各自轨道上绕地球做匀速圆周运动的假想图如下,A代表“天宫一号”,B代表“神舟八号”,虚线为各自的轨道.由此假想图,可以判定( )
我国已于2011年11月3日成功实现“神舟八号”飞船与“天宫一号”对接.某同学得知上述消息后,画出“天宫一号”和“神舟八号”对接前在各自轨道上绕地球做匀速圆周运动的假想图如下,A代表“天宫一号”,B代表“神舟八号”,虚线为各自的轨道.由此假想图,可以判定( )| A. | “天宫一号”和“神舟八号”的运行速率都小于7.9km/s | |
| B. | “天宫一号”的加速度大于“神舟八号”的加速度 | |
| C. | “天宫一号”的周期大于“神舟八号”的周期 | |
| D. | “神舟八号”加速后可以与“天宫一号”实现对接 |
 如图所示,把一个边长为l的质量分布均匀的立方体,绕bc棱翻转使对角面AbcD处于竖直位置时,重心位置升高了$\frac{\sqrt{2}-1}{2}l$.
如图所示,把一个边长为l的质量分布均匀的立方体,绕bc棱翻转使对角面AbcD处于竖直位置时,重心位置升高了$\frac{\sqrt{2}-1}{2}l$.
11.钓鱼岛自古就是我国固有领土,又称钓鱼台、钓鱼台群岛、钓鱼台列岛,位置在距温州市约356km、福州市约385km、基隆市约190km.若我国某海监船为维护我国对钓鱼岛主权,从温州出发去钓鱼岛巡航,到达钓鱼岛时航行了480km.则下列说法中不正确的是( )
| A. | 该海监船位移是480km | |
| B. | 该海监船位移是356km | |
| C. | 该海监船在海上航行时,确定其位置时可以将该海监船看成质点 | |
| D. | 若知道此次航行时间可求出此次航行的近似平均速度 |
8.关于磁感应强度B,正确的说法是( )
| A. | 根据定义式B=$\frac{F}{IL}$,磁场中某点的磁感应强度B与F成正比,与IL成反比 | |
| B. | 根据定义式B=$\frac{F}{IL}$,B的方向与F的方向相同 | |
| C. | 小磁针在磁场中静止时N极所指的方向为该点的磁场方向 | |
| D. | 沿磁感线方向,磁感应强度B越来越小 |
9.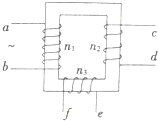 如图所示为一理想变压器,n1为原线圈,接一正弦式电流,n2=n3,在n2、n3两个线圈上分别获得35V电压,要想得到70V电压,c、d、e、f怎样连接( )
如图所示为一理想变压器,n1为原线圈,接一正弦式电流,n2=n3,在n2、n3两个线圈上分别获得35V电压,要想得到70V电压,c、d、e、f怎样连接( )
如图所示为一理想变压器,n1为原线圈,接一正弦式电流,n2=n3,在n2、n3两个线圈上分别获得35V电压,要想得到70V电压,c、d、e、f怎样连接( )| A. | d、e连在一起,c、f为输出端 | B. | c、f连在一起,d、e为输出端 | ||
| C. | e、c连在一起,f、d为输出端 | D. | f、d连在一起,e、c为输出端 |