 在测量小灯泡电阻的实验中,因缺少电压表,小军利用两个电流表和一个已知阻值为20Ω的电阻R0,同样测出了小灯泡的电阻,原理如图甲所示.小军读出电流表A1的示数为0.3A,而电流表A2的示数如图乙所示,则小灯泡L两端的电压为2V,电阻为10Ω.
在测量小灯泡电阻的实验中,因缺少电压表,小军利用两个电流表和一个已知阻值为20Ω的电阻R0,同样测出了小灯泡的电阻,原理如图甲所示.小军读出电流表A1的示数为0.3A,而电流表A2的示数如图乙所示,则小灯泡L两端的电压为2V,电阻为10Ω.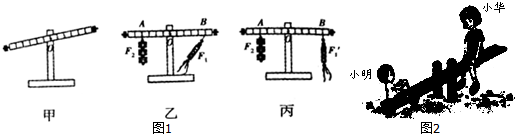

10. 如图所示是小明利用刻度均匀的匀质杠杆进行探究“杠杆的平衡条件”实验.(每个钩码重0.5N)
如图所示是小明利用刻度均匀的匀质杠杆进行探究“杠杆的平衡条件”实验.(每个钩码重0.5N)
(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆右端下沉,这时应将平衡螺母向左(选填“左”或“右”)端调节,直到杠杆在水平位置平衡.
(2)小明在实验中记录了三次实验数据如下表:
实验时杠杆在水平位置平衡的目的是:便于测量力臂;多次实验的目的是:使得出的结论更具有普遍性;小明根据以上数据得出杠杆平衡的条件是:F1l1=F2l2.
(3)在A点悬挂两个钩码,要使杠杆在水平位置平衡,需在B点悬挂3个钩码,取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向上拉,使杠杆水平位置平衡,测力计的拉力应为0.75N;观察实验数据,发现实验中弹簧测力计示数偏大,检测弹簧测力计发现完好无损,原因可能是弹簧测力计拉力的方向没有与杠杆垂直.
如图所示是小明利用刻度均匀的匀质杠杆进行探究“杠杆的平衡条件”实验.(每个钩码重0.5N)(1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆右端下沉,这时应将平衡螺母向左(选填“左”或“右”)端调节,直到杠杆在水平位置平衡.
(2)小明在实验中记录了三次实验数据如下表:
| 次数 | F 1/N | l1/cm | F2/N | l2/cm |
| 1 | 1 | 10 | 2 | 5 |
| 2 | 2 | 10 | 1 | 20 |
| 3 | 3 | 15 | 3 | 10 |
(3)在A点悬挂两个钩码,要使杠杆在水平位置平衡,需在B点悬挂3个钩码,取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向上拉,使杠杆水平位置平衡,测力计的拉力应为0.75N;观察实验数据,发现实验中弹簧测力计示数偏大,检测弹簧测力计发现完好无损,原因可能是弹簧测力计拉力的方向没有与杠杆垂直.
9.在研究杠杆平衡条件的实验中.
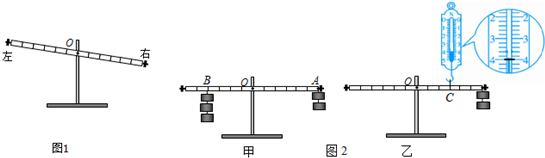
(1)为了使图1中的杠杆在水平位置平衡,以下操作可行的是AC.
A.左端螺母向左调
B.左端螺母向右调
C.右端螺母向左调
D.右端螺母向右调
(2)已知杠杆上相邻刻度线的间隔相等,实验时如图2所示,在杠杆A点挂两个总重为2N的钩码,在B点下挂三个钩码,则杠杆处于水平平衡(图甲).若改用测力计如图乙那样拉,杠杆也处于水平平衡.请将实验数值填入表格中.
(1)为了使图1中的杠杆在水平位置平衡,以下操作可行的是AC.
A.左端螺母向左调
B.左端螺母向右调
C.右端螺母向左调
D.右端螺母向右调
(2)已知杠杆上相邻刻度线的间隔相等,实验时如图2所示,在杠杆A点挂两个总重为2N的钩码,在B点下挂三个钩码,则杠杆处于水平平衡(图甲).若改用测力计如图乙那样拉,杠杆也处于水平平衡.请将实验数值填入表格中.
| 实验 | 动力F1/N | 动力臂l1/格 | 阻力F2/N | 阻力臂l2/格 |
| 图甲 | 2 | 6 | 4 | |
| 图乙 | 2 | 6 |
8.小明在探究“杠杆的平衡条件”时:
(1)小明将杠杆放在水平桌面上,发现杠杆右端下倾,那么他应该将杠杆左端的螺母向左(选填“左”或“右”)调节.为了便于测量力臂,他调节杠杆两端的平衡螺母,使杠杆在水平位置平衡;
(2)下表是小明的实验记录,在这两组数据中,他发现实验序号为1的一组数据是错误的.经检查,结果是测量阻力臂时读错了,阻力臂的实际值应为0.6m;通过探究,小明得到杠杆的平衡条件是F1L1=F2L2.
0 184477 184485 184491 184495 184501 184503 184507 184513 184515 184521 184527 184531 184533 184537 184543 184545 184551 184555 184557 184561 184563 184567 184569 184571 184572 184573 184575 184576 184577 184579 184581 184585 184587 184591 184593 184597 184603 184605 184611 184615 184617 184621 184627 184633 184635 184641 184645 184647 184653 184657 184663 184671 235360
(1)小明将杠杆放在水平桌面上,发现杠杆右端下倾,那么他应该将杠杆左端的螺母向左(选填“左”或“右”)调节.为了便于测量力臂,他调节杠杆两端的平衡螺母,使杠杆在水平位置平衡;
(2)下表是小明的实验记录,在这两组数据中,他发现实验序号为1的一组数据是错误的.经检查,结果是测量阻力臂时读错了,阻力臂的实际值应为0.6m;通过探究,小明得到杠杆的平衡条件是F1L1=F2L2.
| 实验序号 | 动力F1/N | 动力臂L1/m | 阻力F2/N | 阻力臂L2/m |
| 1 | 2 | 0.3 | l | 0.4 |
| 2 | 1 | 0.4 | 2 | 0.2 |

 为测量规格“6.3V,0.15A”小灯泡的额定功率,提供的实验器材有:蓄电池(输出电压约10V)、滑动变阻器(有“10Ω,2A”、“50Ω,1.5A”两种规格)、电流表、电压表各一只.
为测量规格“6.3V,0.15A”小灯泡的额定功率,提供的实验器材有:蓄电池(输出电压约10V)、滑动变阻器(有“10Ω,2A”、“50Ω,1.5A”两种规格)、电流表、电压表各一只.