
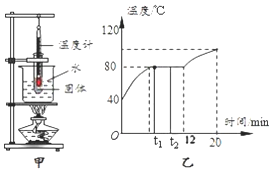
 如图甲,是“探究某种固体物质熔化特点”的实验装置,图乙是根据实验数据描绘出的该物质在熔化过程中温度随时间变化的图象.
如图甲,是“探究某种固体物质熔化特点”的实验装置,图乙是根据实验数据描绘出的该物质在熔化过程中温度随时间变化的图象. 小米在“研究物体的动能与哪些因素有关”的实验中,提出两个猜想:
小米在“研究物体的动能与哪些因素有关”的实验中,提出两个猜想:
15.在探究“杠杆的平衡条件”的实验中:
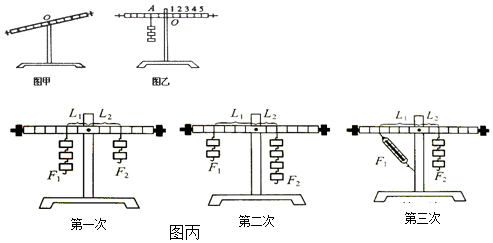
(1)若实验前没有挂钩码时杠杆静止在图甲所示位置,应将右端的平衡螺母向右(左、右)适当调节.
(2)在实验时,应使杠杆在水平位置平衡,其目的是便于测量力臂.
(3)实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆后,在杠杆左边、离支点两格的A处挂有3个钩码,如图乙所示,为使杠杆在水平位置平衡,在杠杆右边的第三格处挂2个钩码
(4)图丙是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在表中.
①请将表格中的实验数据补充完整.A:L2=15cm
②小明的第三次实验存在错误,错误的原因是弹簧测力计未与杠杆垂直,力臂不沿杠杆的方向,动力臂测量错误.
③该实验中,小明进行了多次测量,其目的是使实验结论具有普遍性.
④在第三次实验中,若测力计由图示位置匀速转到竖直位置,该过程中测力计的示数会变小(变大,不变,变小).
⑤从该实验中我们可以归纳出杠杆的平衡条件F1L1=F2L2.
0 171590 171598 171604 171608 171614 171616 171620 171626 171628 171634 171640 171644 171646 171650 171656 171658 171664 171668 171670 171674 171676 171680 171682 171684 171685 171686 171688 171689 171690 171692 171694 171698 171700 171704 171706 171710 171716 171718 171724 171728 171730 171734 171740 171746 171748 171754 171758 171760 171766 171770 171776 171784 235360
(1)若实验前没有挂钩码时杠杆静止在图甲所示位置,应将右端的平衡螺母向右(左、右)适当调节.
(2)在实验时,应使杠杆在水平位置平衡,其目的是便于测量力臂.
(3)实验中共有6个钩码,杠杆上每格距离相等,调节好杠杆后,在杠杆左边、离支点两格的A处挂有3个钩码,如图乙所示,为使杠杆在水平位置平衡,在杠杆右边的第三格处挂2个钩码
(4)图丙是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在表中.
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 | A |
| 2 | 1 | 20 | 2 | 10 |
| 3 | 1 | 20 | 1.5 | 10 |
②小明的第三次实验存在错误,错误的原因是弹簧测力计未与杠杆垂直,力臂不沿杠杆的方向,动力臂测量错误.
③该实验中,小明进行了多次测量,其目的是使实验结论具有普遍性.
④在第三次实验中,若测力计由图示位置匀速转到竖直位置,该过程中测力计的示数会变小(变大,不变,变小).
⑤从该实验中我们可以归纳出杠杆的平衡条件F1L1=F2L2.
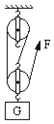 如图所示,用滑轮组提起重900N的物体,绳子自由端拉力F为400N,重物在20s内匀速升高了10m.求:
如图所示,用滑轮组提起重900N的物体,绳子自由端拉力F为400N,重物在20s内匀速升高了10m.求: 街道上的小彩灯同时亮同时灭,同串中的灯与灯之间的连接方式为串联,在彩灯的内部(如图),灯丝和细金属丝之间为并联,所以当一个彩灯的灯丝熔断时,在这个彩灯的两端瞬间电压就可达到家庭照明电压220伏,将细金属丝的绝缘漆击穿,从而使电流从金属丝通过,其它彩灯可以工作.
街道上的小彩灯同时亮同时灭,同串中的灯与灯之间的连接方式为串联,在彩灯的内部(如图),灯丝和细金属丝之间为并联,所以当一个彩灯的灯丝熔断时,在这个彩灯的两端瞬间电压就可达到家庭照明电压220伏,将细金属丝的绝缘漆击穿,从而使电流从金属丝通过,其它彩灯可以工作.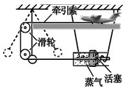 “辽宁舰”的服役圆了中国航母梦.如图为航母上简化的蒸气弹射装置,能带动舰载机在两秒钟内达到起飞速度.牵引索与蒸气活塞连接的两个滑轮为定(“定”或“动”)滑轮,使用该滑轮的好处是改变力的方向;气缸内蒸气体积膨胀对外做功,内能转化为活塞的机械能,使舰载机获得巨大的牵引力,该过程和热机中的做功冲程相类似.
“辽宁舰”的服役圆了中国航母梦.如图为航母上简化的蒸气弹射装置,能带动舰载机在两秒钟内达到起飞速度.牵引索与蒸气活塞连接的两个滑轮为定(“定”或“动”)滑轮,使用该滑轮的好处是改变力的方向;气缸内蒸气体积膨胀对外做功,内能转化为活塞的机械能,使舰载机获得巨大的牵引力,该过程和热机中的做功冲程相类似.