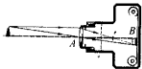
 如图所示的是照相机成像原理图,其中A是照相机镜头,它的作用相当于凸透镜;物体通过照相机镜头可以在底片上形成一个倒立、缩小的实像.
如图所示的是照相机成像原理图,其中A是照相机镜头,它的作用相当于凸透镜;物体通过照相机镜头可以在底片上形成一个倒立、缩小的实像.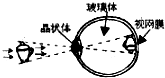 请仔细阅读下文,按要求回答问题
请仔细阅读下文,按要求回答问题 请在图中画出近视眼看物体所成像的大致位置,并在像上标出与物体上A点相对应的像点A.
请在图中画出近视眼看物体所成像的大致位置,并在像上标出与物体上A点相对应的像点A.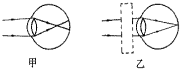 按下面要求作图.图甲是远处物体在某人眼睛成像的示意图,请在图乙中的虚线框内填上适当的透镜,使远处物体成像在视网膜上.
按下面要求作图.图甲是远处物体在某人眼睛成像的示意图,请在图乙中的虚线框内填上适当的透镜,使远处物体成像在视网膜上.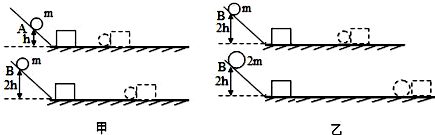

7.小明同学在“研究杠杆平衡条件”实验中:
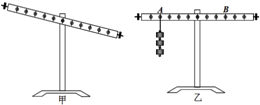
(1)实验时应先调节杠杆在水平位置平衡,这样做的目的是便于测量力臂,若出现图甲所示情况,应将杠杆的螺母向左(选填“左”或“右”)调.
(2)杠杆平衡后,小明在图乙所示的A位置挂上3个钩码,为了使杠杆在水平位置平衡,这时 应在B位置挂上4个钩码.
(3)如表是该组某同学在实验中记录杠杆平衡的部分数据:
如表中空格处所缺的数据是:△=1,☆=20;
(4)分析如表中的实验数据可以得出的结论是F1L1=F2L2.
0 170176 170184 170190 170194 170200 170202 170206 170212 170214 170220 170226 170230 170232 170236 170242 170244 170250 170254 170256 170260 170262 170266 170268 170270 170271 170272 170274 170275 170276 170278 170280 170284 170286 170290 170292 170296 170302 170304 170310 170314 170316 170320 170326 170332 170334 170340 170344 170346 170352 170356 170362 170370 235360
(1)实验时应先调节杠杆在水平位置平衡,这样做的目的是便于测量力臂,若出现图甲所示情况,应将杠杆的螺母向左(选填“左”或“右”)调.
(2)杠杆平衡后,小明在图乙所示的A位置挂上3个钩码,为了使杠杆在水平位置平衡,这时 应在B位置挂上4个钩码.
(3)如表是该组某同学在实验中记录杠杆平衡的部分数据:
| 实验次数 | F1(N) | l1(cm) | F2( N) | l2( cm) |
| 1 | 2 | 5 | △ | 10 |
| 2 | 3 | 10 | 2 | 15 |
| 3 | 2 | 30 | 3 | ☆ |
(4)分析如表中的实验数据可以得出的结论是F1L1=F2L2.
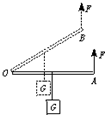 如图所示,用竖直向上方向不变的力F,将杠杆从A位置匀速提升到B位置的过程中,则F的大小将不变 (变大,变小,不变)
如图所示,用竖直向上方向不变的力F,将杠杆从A位置匀速提升到B位置的过程中,则F的大小将不变 (变大,变小,不变)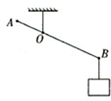 如图所示,画出使杠杆AB在如图所示位置静止时所用最小力F及其力臂.
如图所示,画出使杠杆AB在如图所示位置静止时所用最小力F及其力臂.