3. 小明用如图所示的装置,探究摩擦力的大小与哪些因素有关.
小明用如图所示的装置,探究摩擦力的大小与哪些因素有关.
(1)实验时,小明将木块放在水平木板上,弹簧测力计沿水平方向拉动木块,并使木块作匀速直线运动.这样做的目的是使拉力大小等于摩擦力大小,实验时,小明记录的部分数据如下表所示.
(2)分析序号1、2、3三组数据可知:滑动摩擦力的大小与接触面所受的压力有关.滑动摩擦力f大小与接触面所受压力F大小的关系式是f=0.2F.
(3)分析序号1,4,5三组数据可知:滑动摩擦力的大小还与接触面的粗糙程度有关.
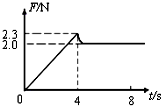
(4)小明在实验时还发现:在木块没有被拉动时,弹簧测力计示数会变化.他请教老师,知道可用F-t图象表示拉力随时间的变化情况.若某次实验开始拉动木块直到木块匀速滑动的F-t图象如图所示,其中0~4s木块处于静止状态.分析图象可知:要使木块由静止开始运动,至少要用2.3N的水平拉力拉木块;如果实验时木块所受的拉力是2N,则木块所处的运动状态是静止或匀速直线运动.
小明用如图所示的装置,探究摩擦力的大小与哪些因素有关.(1)实验时,小明将木块放在水平木板上,弹簧测力计沿水平方向拉动木块,并使木块作匀速直线运动.这样做的目的是使拉力大小等于摩擦力大小,实验时,小明记录的部分数据如下表所示.
| 序号 | 木块放置 情况 | 木板表面情况 | 压力/N | 弹簧测力计 示数/N |
| 1 | 平放 | 木板 | 6 | 1.2 |
| 2 | 平放 | 木板 | 8 | 1.6 |
| 3 | 平放 | 木板 | 10 | 2.0 |
| 4 | 平放 | 木板上铺棉布 | 6 | 1.8 |
| 5 | 平放 | 木板上铺毛巾 | 6 | 3.0 |
(3)分析序号1,4,5三组数据可知:滑动摩擦力的大小还与接触面的粗糙程度有关.
(4)小明在实验时还发现:在木块没有被拉动时,弹簧测力计示数会变化.他请教老师,知道可用F-t图象表示拉力随时间的变化情况.若某次实验开始拉动木块直到木块匀速滑动的F-t图象如图所示,其中0~4s木块处于静止状态.分析图象可知:要使木块由静止开始运动,至少要用2.3N的水平拉力拉木块;如果实验时木块所受的拉力是2N,则木块所处的运动状态是静止或匀速直线运动.
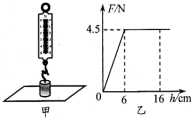 如图甲所示,用弹簧测力计测量水平桌面上的钩码所受的重力.弹簧测力计从图示位置开始向上缓慢提升,其示数F与弹簧测力计上升的高度h之间的关系如图乙所示.
如图甲所示,用弹簧测力计测量水平桌面上的钩码所受的重力.弹簧测力计从图示位置开始向上缓慢提升,其示数F与弹簧测力计上升的高度h之间的关系如图乙所示.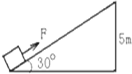 如图所示,将一个重为10N的木块沿倾角为30°斜面匀速向上拉至顶端,拉力为8N,斜面高5m,拉力做功为80J,木块所受的摩擦力为3N.若仅使倾角θ逐渐增大,沿斜面向上的拉力将逐渐增大(选填“增大”、“不变”或“减小”).
如图所示,将一个重为10N的木块沿倾角为30°斜面匀速向上拉至顶端,拉力为8N,斜面高5m,拉力做功为80J,木块所受的摩擦力为3N.若仅使倾角θ逐渐增大,沿斜面向上的拉力将逐渐增大(选填“增大”、“不变”或“减小”). 用一个动滑轮把重100N的物体,在10s内匀速提到5m高的楼上,作用在绳上的拉力F为60N,(若不计绳重和摩擦),则绳子移动的距离为10m,拉力F做功的功率为60W.动滑轮的机械效率为83.3%.将120N的物体运到楼上此时动滑轮的机械效率为85.7%.
用一个动滑轮把重100N的物体,在10s内匀速提到5m高的楼上,作用在绳上的拉力F为60N,(若不计绳重和摩擦),则绳子移动的距离为10m,拉力F做功的功率为60W.动滑轮的机械效率为83.3%.将120N的物体运到楼上此时动滑轮的机械效率为85.7%.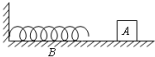 如图,物体A和弹簧放在光滑的水平面上.用手将A向左弹出,当弹簧右端被A压至B处时,A速度为零.A向左的运动情况是先匀速后减速(选填“先匀速后减速”或“先加速后减速”或“先加速后匀速”).
如图,物体A和弹簧放在光滑的水平面上.用手将A向左弹出,当弹簧右端被A压至B处时,A速度为零.A向左的运动情况是先匀速后减速(选填“先匀速后减速”或“先加速后减速”或“先加速后匀速”). 如图所示,材料、粗糙程度和质量相同的甲、乙两物体放在同一水平桌面上,在水平拉力作用下做匀速直线运动.它们所受的拉力为F甲、F乙,对桌面的压强为p甲、p乙,则关系正确的是F甲= F乙,p甲< p乙(选填“>”“=”或“<”).
如图所示,材料、粗糙程度和质量相同的甲、乙两物体放在同一水平桌面上,在水平拉力作用下做匀速直线运动.它们所受的拉力为F甲、F乙,对桌面的压强为p甲、p乙,则关系正确的是F甲= F乙,p甲< p乙(选填“>”“=”或“<”).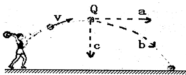 如图是实心球离开手后在空中的运动轨迹(不考虑空气阻力的影响),当实心球运动到最高点Q时,受到1个力的作用,此时,如果所受的外力全部消失,实心球将沿a方向运动(选填“静止”、“沿a方向运动”、“沿b方向运动”或“沿c方向运动”).
如图是实心球离开手后在空中的运动轨迹(不考虑空气阻力的影响),当实心球运动到最高点Q时,受到1个力的作用,此时,如果所受的外力全部消失,实心球将沿a方向运动(选填“静止”、“沿a方向运动”、“沿b方向运动”或“沿c方向运动”).
14. 如图某“自动擦窗机器人”的重力为20N,它的“腹部”有个吸盘,吸盘与玻璃的接触面积为1.2×10-3m2.当自动擦窗机器人的真空泵将吸盘内的空气向外抽出时,它能牢牢地吸在竖直玻璃上.下例说法正确的是( )
如图某“自动擦窗机器人”的重力为20N,它的“腹部”有个吸盘,吸盘与玻璃的接触面积为1.2×10-3m2.当自动擦窗机器人的真空泵将吸盘内的空气向外抽出时,它能牢牢地吸在竖直玻璃上.下例说法正确的是( )
0 169837 169845 169851 169855 169861 169863 169867 169873 169875 169881 169887 169891 169893 169897 169903 169905 169911 169915 169917 169921 169923 169927 169929 169931 169932 169933 169935 169936 169937 169939 169941 169945 169947 169951 169953 169957 169963 169965 169971 169975 169977 169981 169987 169993 169995 170001 170005 170007 170013 170017 170023 170031 235360
如图某“自动擦窗机器人”的重力为20N,它的“腹部”有个吸盘,吸盘与玻璃的接触面积为1.2×10-3m2.当自动擦窗机器人的真空泵将吸盘内的空气向外抽出时,它能牢牢地吸在竖直玻璃上.下例说法正确的是( )| A. | 当机器人在竖直玻璃板上静止时,继续向外抽气,受到的摩擦力变大 | |
| B. | 若吸盘对玻璃的压强为1.5×105Pa,则吸盘对玻璃的压力为100N | |
| C. | 当机器人向下运动时,继续向外抽气,受到的摩擦力变大 | |
| D. | 若机器人在6s内匀速竖直向下运动了0.6m,重力做功的功率是1W |