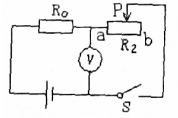
 如图所示,R0的阻值为20Ω,开关闭合后,滑动变阻器的滑片位于中点位置,此时电压表示数为15V;当滑片位于b端时,电压表的示数为20V.则电源电压为多少伏.
如图所示,R0的阻值为20Ω,开关闭合后,滑动变阻器的滑片位于中点位置,此时电压表示数为15V;当滑片位于b端时,电压表的示数为20V.则电源电压为多少伏.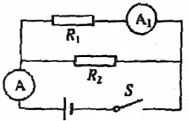 在如图所示的电路中,电阻R1的阻值为10欧.闭合开关S,电流表A1的示数为0.3安,电流表A的示数为0.5安.求:
在如图所示的电路中,电阻R1的阻值为10欧.闭合开关S,电流表A1的示数为0.3安,电流表A的示数为0.5安.求: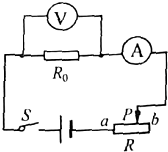 电压表内电阻较大,但在实际电路中也有一定电流通过.小明利用下列器材测量一电压表的内电阻RV:稳压电源、电流表、定值电阻R0(阻值已知)、滑动变阻器R、开关和导线若干,并设计了如图所示的电路图.请按要求完成下列问题:
电压表内电阻较大,但在实际电路中也有一定电流通过.小明利用下列器材测量一电压表的内电阻RV:稳压电源、电流表、定值电阻R0(阻值已知)、滑动变阻器R、开关和导线若干,并设计了如图所示的电路图.请按要求完成下列问题: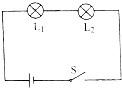 实验室中某同学连接了如图所示的电路,发现闭合开关后两灯都不亮.该同学用电压表去查找电路的故障,将电压表先并联在灯L1两端发现电压表有示数:再将电压表并联在灯L2两端发现电压表无示数,若电路中只存在一处故障,由此可判断A
实验室中某同学连接了如图所示的电路,发现闭合开关后两灯都不亮.该同学用电压表去查找电路的故障,将电压表先并联在灯L1两端发现电压表有示数:再将电压表并联在灯L2两端发现电压表无示数,若电路中只存在一处故障,由此可判断A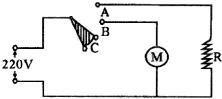 所示是额定电压为220V的理发用电吹风的典型电路,其中电热丝通电后可以发热,电动机通电后可以送风,且电动机的额定功率为120W.
所示是额定电压为220V的理发用电吹风的典型电路,其中电热丝通电后可以发热,电动机通电后可以送风,且电动机的额定功率为120W.
9.同学们通过观察实验研究了影响杠杆平衡的因素,之后对杠杆究竟在什么条件下才平衡展开探究.请你随同学们一同进行实验探究.

(1)图(a)是处于平衡状态的杠杆.图(b)(c)(d)是同学们的操作及现象,由此得到的实验结论是:作用在杠杆两边上的力的大小、方向和作用点都能影响杠杆的平衡.
(2)为便于描述力对杠杆的作用效果,物理学中引入了“力臂”的概念.因为力臂同时包含了力的方向和作用点两个要素.因此同学们利用图e所示的装置及材料(钩码0.5N/个,杠杆分度4cm/格)设计了“探究杠杆的平衡条件”的实验步骤如下.
a.在未悬挂钩码前,向右端调节杠杆两端的平衡螺母,使杠杆在水平位置静止;
b.在杠杆支点两侧分别悬挂不同数量的钩码并调节其位置,使杠杆在水平位置重新平衡,记录动力、阻力(大小分别等于两侧所悬挂 钩码的重力)及动力臂、阻力臂等数据于表格中;
c.改变钩码数量重复步骤b,进行多次实验.
①将实验步骤中的划线部分补充完整;
②请你分析并处理表中实验数据,归纳得出杠杆平衡的条件.
(1)图(a)是处于平衡状态的杠杆.图(b)(c)(d)是同学们的操作及现象,由此得到的实验结论是:作用在杠杆两边上的力的大小、方向和作用点都能影响杠杆的平衡.
(2)为便于描述力对杠杆的作用效果,物理学中引入了“力臂”的概念.因为力臂同时包含了力的方向和作用点两个要素.因此同学们利用图e所示的装置及材料(钩码0.5N/个,杠杆分度4cm/格)设计了“探究杠杆的平衡条件”的实验步骤如下.
a.在未悬挂钩码前,向右端调节杠杆两端的平衡螺母,使杠杆在水平位置静止;
b.在杠杆支点两侧分别悬挂不同数量的钩码并调节其位置,使杠杆在水平位置重新平衡,记录动力、阻力(大小分别等于两侧所悬挂 钩码的重力)及动力臂、阻力臂等数据于表格中;
c.改变钩码数量重复步骤b,进行多次实验.
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 0.5 | 24 | 1.0 | 12 |
| 2 | 1.5 | 16 | 1.0 | 24 |
| 3 | 1.0 | 8 | 2.0 | 4 |
②请你分析并处理表中实验数据,归纳得出杠杆平衡的条件.
8.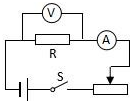 同学们要探究“通过导体的电流跟电阻的关系”.电路如图所示,其中已知阻值的定值电阻3个.
同学们要探究“通过导体的电流跟电阻的关系”.电路如图所示,其中已知阻值的定值电阻3个.
(1)按电路图连接电路时,在导线连接完成后,闭合开关前还应将滑动变阻器的滑片移到最右端.
(2)同学们继续进行实验.一位同学在读取完电流表示数填入表中后,直接拆下阻值为5Ω的电阻改换成阻值为10Ω的电阻.请你指出他在操作中的不规范之处是在更换电阻之前没有断开开关.接下来的操作应该是断开开关,将滑动变阻器的滑片移到最右端,然后将10Ω的电阻接入电路,闭合开关,调节滑片,使电阻R两端电压保持2V不变.
(3)同学们在实验中得到的数据如表所示,分析表中实验数据,请你总结出电流与电阻的关系.
0 169716 169724 169730 169734 169740 169742 169746 169752 169754 169760 169766 169770 169772 169776 169782 169784 169790 169794 169796 169800 169802 169806 169808 169810 169811 169812 169814 169815 169816 169818 169820 169824 169826 169830 169832 169836 169842 169844 169850 169854 169856 169860 169866 169872 169874 169880 169884 169886 169892 169896 169902 169910 235360
同学们要探究“通过导体的电流跟电阻的关系”.电路如图所示,其中已知阻值的定值电阻3个.(1)按电路图连接电路时,在导线连接完成后,闭合开关前还应将滑动变阻器的滑片移到最右端.
(2)同学们继续进行实验.一位同学在读取完电流表示数填入表中后,直接拆下阻值为5Ω的电阻改换成阻值为10Ω的电阻.请你指出他在操作中的不规范之处是在更换电阻之前没有断开开关.接下来的操作应该是断开开关,将滑动变阻器的滑片移到最右端,然后将10Ω的电阻接入电路,闭合开关,调节滑片,使电阻R两端电压保持2V不变.
(3)同学们在实验中得到的数据如表所示,分析表中实验数据,请你总结出电流与电阻的关系.
| 电压U=2V | |||
| 次数 | 1 | 2 | 3 |
| 电阻R/Ω | 5 | 10 | 20 |
| 电流I/A | 0.4 | 0.2 | 0.1 |
 如图所示,晓彤想在A点用滑轮组提起重物,请在图中画出晓彤所用最小力的绳子绕法及在绳上所施力的方向.
如图所示,晓彤想在A点用滑轮组提起重物,请在图中画出晓彤所用最小力的绳子绕法及在绳上所施力的方向.