3.如图甲所示,小明在探究“杠杆的平衡条件”实验
(1)在“探究杠杆平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做是为了便于测量力臂;如发现杠杆左端偏高,则可将右端的平衡螺母向左调节,或将左端的平衡螺母向左调节;
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码杠杆恰好在原位置平衡.于是小明便得出了杠杆的平衡条件为:F1L1=F2L2.他这样得出的结论是否合理?不合理;为什么?只有一次实验,实验结论具有偶然性.
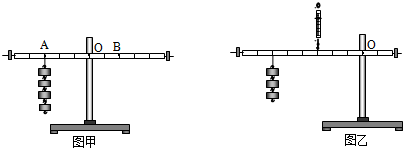
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是:杠杆自身重力对杠杆的平衡有影响.
(4)实验时只有8个相同的钩码,杠杆上每格等距,如图甲,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
①在支点右侧第三格处挂4个钩码;
②在支点右侧第四格处挂3个钩码.

(5)图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在表中.将表格中的实验数据补充完整.
(6)小明的第3次实验存在错误,其错误是弹簧测力计没有竖直向下拉(或动力臂测量错误).
(1)在“探究杠杆平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做是为了便于测量力臂;如发现杠杆左端偏高,则可将右端的平衡螺母向左调节,或将左端的平衡螺母向左调节;
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码杠杆恰好在原位置平衡.于是小明便得出了杠杆的平衡条件为:F1L1=F2L2.他这样得出的结论是否合理?不合理;为什么?只有一次实验,实验结论具有偶然性.
(3)实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图乙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡条件不相符.其原因是:杠杆自身重力对杠杆的平衡有影响.
(4)实验时只有8个相同的钩码,杠杆上每格等距,如图甲,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?(请设计两种方案)
①在支点右侧第三格处挂4个钩码;
②在支点右侧第四格处挂3个钩码.
(5)图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在表中.将表格中的实验数据补充完整.
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 | |
| 2 | 1 | 20 | 10 | |
| 3 | 1 | 20 | 1.5 | 10 |
2. 小明同学做实验时,连成了如图所示的电路.闭合开关后,发现灯泡L1和灯泡L2都不亮,电压表有示数.下列哪些情况会产生这一现象( )
小明同学做实验时,连成了如图所示的电路.闭合开关后,发现灯泡L1和灯泡L2都不亮,电压表有示数.下列哪些情况会产生这一现象( )
小明同学做实验时,连成了如图所示的电路.闭合开关后,发现灯泡L1和灯泡L2都不亮,电压表有示数.下列哪些情况会产生这一现象( )| A. | L1断路,L2完好 | B. | L1和L2均断路 | C. | L1完好,L2断路 | D. | L1断路,L2短路 |
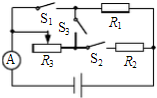 如图,电源电压恒定,R1、R2是定值电阻,R1=10Ω,滑动变阻器R3标有“20Ω 0.5A”字样.只闭合开关S1,电流表的示数为0.9A;再闭合开关S2、S3,电流表的示数变为1.5A,求:
如图,电源电压恒定,R1、R2是定值电阻,R1=10Ω,滑动变阻器R3标有“20Ω 0.5A”字样.只闭合开关S1,电流表的示数为0.9A;再闭合开关S2、S3,电流表的示数变为1.5A,求: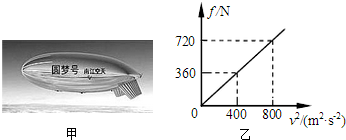 2015年10月,我国研发的平流层飞艇“圆梦”号(如图甲)首飞成功.飞艇依靠浮力可升到20km高的平流层,其推进系统有太阳能电池提供能量.推进器产生的推力与气流对飞艇的水平作用力平衡,可使飞艇长时间悬停.
2015年10月,我国研发的平流层飞艇“圆梦”号(如图甲)首飞成功.飞艇依靠浮力可升到20km高的平流层,其推进系统有太阳能电池提供能量.推进器产生的推力与气流对飞艇的水平作用力平衡,可使飞艇长时间悬停.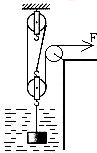 某桥梁施工队用如图所示的滑轮组打捞沉在水底的工件.已知工件的体积是0.16m3,密度是3.5×103kg/m3,滑轮组向上匀速拉动浸没在水中的工件时,人在绳子的自由端施加的拉力F=1600N.(不考虑摩擦及水的阻力,g取g=10N/kg)求:
某桥梁施工队用如图所示的滑轮组打捞沉在水底的工件.已知工件的体积是0.16m3,密度是3.5×103kg/m3,滑轮组向上匀速拉动浸没在水中的工件时,人在绳子的自由端施加的拉力F=1600N.(不考虑摩擦及水的阻力,g取g=10N/kg)求:
17.下列对常见物理量的估计正确的是( )
0 168861 168869 168875 168879 168885 168887 168891 168897 168899 168905 168911 168915 168917 168921 168927 168929 168935 168939 168941 168945 168947 168951 168953 168955 168956 168957 168959 168960 168961 168963 168965 168969 168971 168975 168977 168981 168987 168989 168995 168999 169001 169005 169011 169017 169019 169025 169029 169031 169037 169041 169047 169055 235360
| A. | 中学生的重力约为50N | B. | 人的密度约为0.5×103kg/m3 | ||
| C. | 现在教室内的气压约为105Pa | D. | 中学生正常步行的速度约为5m/s |