

6.根据“探究杠杆平衡的条件”实验要求,完成下列各题: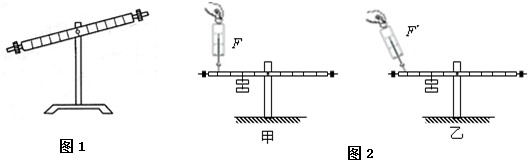
(1)杠杆平衡,是指杠杆处于静止状态或匀速状态.
(2)该实验中所用的器材有铁架台、带刻度的杠杆、钩码、弹簧夹和弹簧测力计.某同学先把杠杆的中点支在支架上,发现杠杆的右端翘起如图1所示,他可以通过调节左端的平衡螺母向右移动,使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(3)如果采用图2的方法实验,当弹簧测力计由图甲竖直的拉着变成图乙倾斜的拉着,使杠杆在水平位置静止时,弹簧测力计的示数将变大(选填“变大”、“不变”或“变小”).
(4)小明同学做了二次试验,得到当杠杆平衡时如表中记录的数据:
这两组数据中,可以肯定序号2的一组数据是错误的,如果他的操作正确,钩码的重量和力臂的值也没有错,那么此组数据的错误的原因是动力或动力臂测量错误.
(5)改变力和力臂的数值,实验三次的目的是C
A、从三次试验中选取最准确的数据;
B、三次测量取平均值,减小实验误差;
C、从实验数据中得到普遍规律;
D、利用控制变量法.
(6)本实验的实验结论是F1L1=F2L2.
(1)杠杆平衡,是指杠杆处于静止状态或匀速状态.
(2)该实验中所用的器材有铁架台、带刻度的杠杆、钩码、弹簧夹和弹簧测力计.某同学先把杠杆的中点支在支架上,发现杠杆的右端翘起如图1所示,他可以通过调节左端的平衡螺母向右移动,使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(3)如果采用图2的方法实验,当弹簧测力计由图甲竖直的拉着变成图乙倾斜的拉着,使杠杆在水平位置静止时,弹簧测力计的示数将变大(选填“变大”、“不变”或“变小”).
(4)小明同学做了二次试验,得到当杠杆平衡时如表中记录的数据:
| 实验序号 | 动力F1(N) | 动力臂L1(cm) | 阻力F2(N) | 阻力臂L2(cm) |
| 1 | 2 | 12 | 6 | 4 |
| 2 | 4 | 16 | 2 | 8 |
(5)改变力和力臂的数值,实验三次的目的是C
A、从三次试验中选取最准确的数据;
B、三次测量取平均值,减小实验误差;
C、从实验数据中得到普遍规律;
D、利用控制变量法.
(6)本实验的实验结论是F1L1=F2L2.
 在探究杠杆平衡条件的实验中:
在探究杠杆平衡条件的实验中: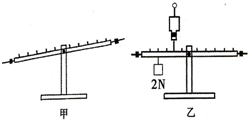 在“探究杠杆平衡条件”的实验中,先把杠杆的中点支在支架上,杠杆停在如图甲所示的位置,此时杠杆处于平衡(填“平衡”或“不平衡”)状态.向右(填“左”或“右”)调节右端的平衡螺母,使杠杆在水平位置平衡,在杠杆上挂2N的重物,改变弹簧测力计的拉力,使杠杆在水平位置平衡,如图乙所示,这样做的好处是便于测量力臂,将所挂的重物往左移1格,杠杆重新水平平衡后,弹簧测力计的示数会变大 (填“变大”、“变小”或“不变”).
在“探究杠杆平衡条件”的实验中,先把杠杆的中点支在支架上,杠杆停在如图甲所示的位置,此时杠杆处于平衡(填“平衡”或“不平衡”)状态.向右(填“左”或“右”)调节右端的平衡螺母,使杠杆在水平位置平衡,在杠杆上挂2N的重物,改变弹簧测力计的拉力,使杠杆在水平位置平衡,如图乙所示,这样做的好处是便于测量力臂,将所挂的重物往左移1格,杠杆重新水平平衡后,弹簧测力计的示数会变大 (填“变大”、“变小”或“不变”).
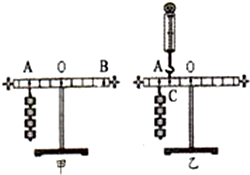
1. 某同学研究杠杆的平衡条件的实验装置如图所示,已知杠杆处于平衡,将表内某同学漏记的数值填入,分析实验数据得出杠杆的平衡条件结论是F1L1=F2L2.
某同学研究杠杆的平衡条件的实验装置如图所示,已知杠杆处于平衡,将表内某同学漏记的数值填入,分析实验数据得出杠杆的平衡条件结论是F1L1=F2L2.
0 168598 168606 168612 168616 168622 168624 168628 168634 168636 168642 168648 168652 168654 168658 168664 168666 168672 168676 168678 168682 168684 168688 168690 168692 168693 168694 168696 168697 168698 168700 168702 168706 168708 168712 168714 168718 168724 168726 168732 168736 168738 168742 168748 168754 168756 168762 168766 168768 168774 168778 168784 168792 235360
某同学研究杠杆的平衡条件的实验装置如图所示,已知杠杆处于平衡,将表内某同学漏记的数值填入,分析实验数据得出杠杆的平衡条件结论是F1L1=F2L2.| 实验次数 | 动力F1(N) | 动力臂L1(cm) | 阻力F2(N) | 阻力臂L2(cm) |
| 1 | 10 | 6 | 15 | |
| 2 | 3 | 15 | 20 |