1.根据“探究杠杆平衡的条件”实验要求,完成下列各题:
(1)杠杆平衡,是指杠杆静止状态或匀速转动状态.
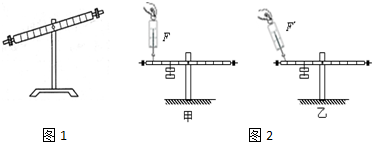
(2)该实验中所用的器材有铁架台、带刻度的杠杆、钩码、弹簧夹和弹簧测力计.某同学先把杠杆的中点支在支架上,发现杠杆的右端翘起如图1所示,他可以通过调节左端的平衡螺母向右移动,使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(3)如果采用图2-甲的方法实验,当弹簧测力计由图甲竖直的拉着变成图2-乙倾斜的拉着,使杠杆在水平位置静止时,弹簧测力计的示数将变大(选填“变大”、“不变”或“变小”).
(4)小明同学做了二次试验,得到当杠杆平衡时如表中记录的数据:
这两组数据中,可以肯定序号2的一组数据是错误的,如果他的操作正确,钩码的重量和力臂的值也没有错,那么此组数据的错误的原因是动力臂测量错误.
(5)改变力和力臂的数值,实验三次的目的是C
A、从三次试验中选取最准确的数据; B、三次测量取平均值,减小实验误差;
C、从实验数据中得到普遍规律; D、利用控制变量法.
(6)本实验的实验结论是F1L1=F2L2.
(1)杠杆平衡,是指杠杆静止状态或匀速转动状态.
(2)该实验中所用的器材有铁架台、带刻度的杠杆、钩码、弹簧夹和弹簧测力计.某同学先把杠杆的中点支在支架上,发现杠杆的右端翘起如图1所示,他可以通过调节左端的平衡螺母向右移动,使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(3)如果采用图2-甲的方法实验,当弹簧测力计由图甲竖直的拉着变成图2-乙倾斜的拉着,使杠杆在水平位置静止时,弹簧测力计的示数将变大(选填“变大”、“不变”或“变小”).
(4)小明同学做了二次试验,得到当杠杆平衡时如表中记录的数据:
| 实验序号 | 动力F1(N) | 动力臂L1(cm) | 阻力F2(N) | 阻力臂L2(cm) |
| 1 | 2 | 12 | 6 | 4 |
| 2 | 4 | 16 | 2 | 8 |
(5)改变力和力臂的数值,实验三次的目的是C
A、从三次试验中选取最准确的数据; B、三次测量取平均值,减小实验误差;
C、从实验数据中得到普遍规律; D、利用控制变量法.
(6)本实验的实验结论是F1L1=F2L2.
 在“测定食用油密度”的实验中,实验步骤如下.
在“测定食用油密度”的实验中,实验步骤如下.
19. 如图所示的电路中,有一盏正常发光的电灯突然熄灭,经检查发现保险丝完好,用测电笔插进插座的两个孔,氖管均发光.造成这一现象的原因可能是( )
如图所示的电路中,有一盏正常发光的电灯突然熄灭,经检查发现保险丝完好,用测电笔插进插座的两个孔,氖管均发光.造成这一现象的原因可能是( )
如图所示的电路中,有一盏正常发光的电灯突然熄灭,经检查发现保险丝完好,用测电笔插进插座的两个孔,氖管均发光.造成这一现象的原因可能是( )| A. | 进户的零线断了 | B. | 插座发生短路了 | C. | 进户的火线断了 | D. | 电灯的灯丝断了 |

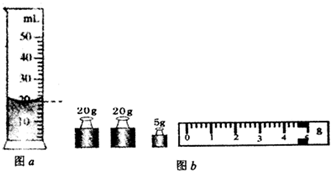 地沟油中含有大量对人体有毒、有害的物质.一些不法商人对其进行简单脱水、脱杂、脱臭处理后,冒充色拉油在市场上销售.小科想用测密度的方法来鉴别色拉油和地沟油.首先,他通过网络查得优质色拉油的密度在0.91g/cm3-0.93g/cm3之间,地沟油的密度在0.94g/cm3-0.95g/cm3之间.然后,他设计了以下步骤进行实验鉴别:
地沟油中含有大量对人体有毒、有害的物质.一些不法商人对其进行简单脱水、脱杂、脱臭处理后,冒充色拉油在市场上销售.小科想用测密度的方法来鉴别色拉油和地沟油.首先,他通过网络查得优质色拉油的密度在0.91g/cm3-0.93g/cm3之间,地沟油的密度在0.94g/cm3-0.95g/cm3之间.然后,他设计了以下步骤进行实验鉴别: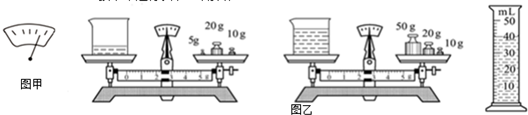
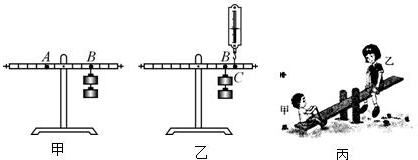
15.三个和尚挑水吃的故事相信大家耳熟能详,甲图中和尚们商量出新的挑水方案,胖和尚一人挑两小桶,瘦和尚和小和尚两人合抬一大桶,以下说法中不正确的是( )
| A. | 乙图中水桶B向下沉,为保持水平平衡,胖和尚可以将他的肩往后移动一点距离 | |
| B. | 丙图中小和尚为减轻瘦和尚的负担,可以让瘦和尚往前移动一点距离 | |
| C. | 乙图中水桶B向下沉,为保持水平平衡,胖和尚可以将后面水桶B往后移动一点距离 | |
| D. | 丙图中小和尚为减轻瘦和尚的负担,可以将水桶往后移动一点距离 |
14.如表是小罗同学拟出的一份实验报告.试回答下列问题:
①请将实验报告中的空白部分填写完整
②在步骤(3)中,使杠杆在该位置平衡的目的是:便于测量力臂
③从“实验步骤”来看,缺少的步骤有:
(a)实验前调节杠杆在水平位置平衡(b)计算动力与动力臂的乘积、阻力与阻力臂的乘积,得出杠杆的平衡条件.
④该同学根据实验记录的数据,得出的实验结论:“当杠杆平衡时,动力+动力臂=阻力+阻力臂”.你认为该结论错误(选填“正确”或“错误”),你的判断理由是数据具有偶然性,不能得出普遍规律,单位不同的物理量不能相加
⑤在同学的帮助下,小罗认识到了自己实验中的不足,并重新进行了实验,实验数据记录如表所示,很明显小罗同学的第三次实验数据并不符合杠杆平衡条件,仔细观察并分析第三次的实验数据,你认为出现这一情况可能的原因是:弹簧测力计没有竖直向下拉动杠杆
| “探究杠杆平衡的条件”实 验 报 告 | |||||||||||||||||
| (1) | 探究杠杆平衡的条件 | ||||||||||||||||
| 实验器材 | 带刻度的均匀杠杆、支架、弹簧夹(或细线)、若干相同的 (2)、(3) | ||||||||||||||||
| 实验步骤 | (1)用弹簧测力计测量一个钩码的重力; (2)将杠杆的 (4)点支在支架上,支架放置在水平桌面上; (3)在杠杆两边挂上不等量的钩码,改变钩码的位置,使杠杆在 (5)位置平衡; (4)记下动力、阻力、动力臂和阻力臂的数值,然后重复多次试验. | ||||||||||||||||
| 实验记录 | 杠杆平衡时
| ||||||||||||||||
| 实验结论 | 动力+动力臂=阻力+阻力臂 | ||||||||||||||||
②在步骤(3)中,使杠杆在该位置平衡的目的是:便于测量力臂
③从“实验步骤”来看,缺少的步骤有:
(a)实验前调节杠杆在水平位置平衡(b)计算动力与动力臂的乘积、阻力与阻力臂的乘积,得出杠杆的平衡条件.
④该同学根据实验记录的数据,得出的实验结论:“当杠杆平衡时,动力+动力臂=阻力+阻力臂”.你认为该结论错误(选填“正确”或“错误”),你的判断理由是数据具有偶然性,不能得出普遍规律,单位不同的物理量不能相加
⑤在同学的帮助下,小罗认识到了自己实验中的不足,并重新进行了实验,实验数据记录如表所示,很明显小罗同学的第三次实验数据并不符合杠杆平衡条件,仔细观察并分析第三次的实验数据,你认为出现这一情况可能的原因是:弹簧测力计没有竖直向下拉动杠杆
| 实验次数 | 动力F1(牛) | 动力臂L1(厘米) | 阻力F2(牛) | 阻力臂L2(厘米) |
| 1 | 2 | 3 | 1 | 6 |
| 2 | 4 | 3 | 6 | 2 |
| 3 | 4 | 5 | 3 | 6 |
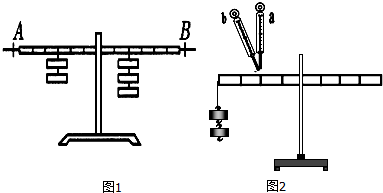
13.如表是小王在“研究杠杆平衡条件”的实验中,记录的部分测量结果,请在空格处填上适当的值(每个钩码的质量为50g,g=10N/㎏).
(1)如实验前没有挂钩码时,发现杠杆的左端下倾,应该将杠杆左端的平衡螺母向右(“左”或“右”)旋一些,使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(2)实验中多次测量的目的是避免实验结论的偶然性,归纳出具有普遍性的规律.
(3)如图1所示的杠杆处于平衡状态,若在两边钩码下再加挂一个相同的钩码,释放后会有什么现象?杠杆会逆时针转动.(选填“仍平衡”“逆时针转动”或“顺时针转动”).如果将上图中杠杆右侧的钩码拿走,则需要用弹簧测力计在支点右侧(选填“左”或“右”)向竖直向下的方向拉,才能使杠杆水平平衡.
(4)如图2所示,沿a、b两个不同方向用力拉弹簧测力计,使杠杆在水平位置平衡,观察比较两次弹簧测力计的示数大小,则B
A.沿a方向拉时示数大 B.沿b方向拉时示数大
C.两次示数一样大 D.无法比较
0 168564 168572 168578 168582 168588 168590 168594 168600 168602 168608 168614 168618 168620 168624 168630 168632 168638 168642 168644 168648 168650 168654 168656 168658 168659 168660 168662 168663 168664 168666 168668 168672 168674 168678 168680 168684 168690 168692 168698 168702 168704 168708 168714 168720 168722 168728 168732 168734 168740 168744 168750 168758 235360
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 0.5 | 8 | 1 | 4 |
| 2 | 6 | 1.5 | 8 |
(2)实验中多次测量的目的是避免实验结论的偶然性,归纳出具有普遍性的规律.
(3)如图1所示的杠杆处于平衡状态,若在两边钩码下再加挂一个相同的钩码,释放后会有什么现象?杠杆会逆时针转动.(选填“仍平衡”“逆时针转动”或“顺时针转动”).如果将上图中杠杆右侧的钩码拿走,则需要用弹簧测力计在支点右侧(选填“左”或“右”)向竖直向下的方向拉,才能使杠杆水平平衡.
(4)如图2所示,沿a、b两个不同方向用力拉弹簧测力计,使杠杆在水平位置平衡,观察比较两次弹簧测力计的示数大小,则B
A.沿a方向拉时示数大 B.沿b方向拉时示数大
C.两次示数一样大 D.无法比较